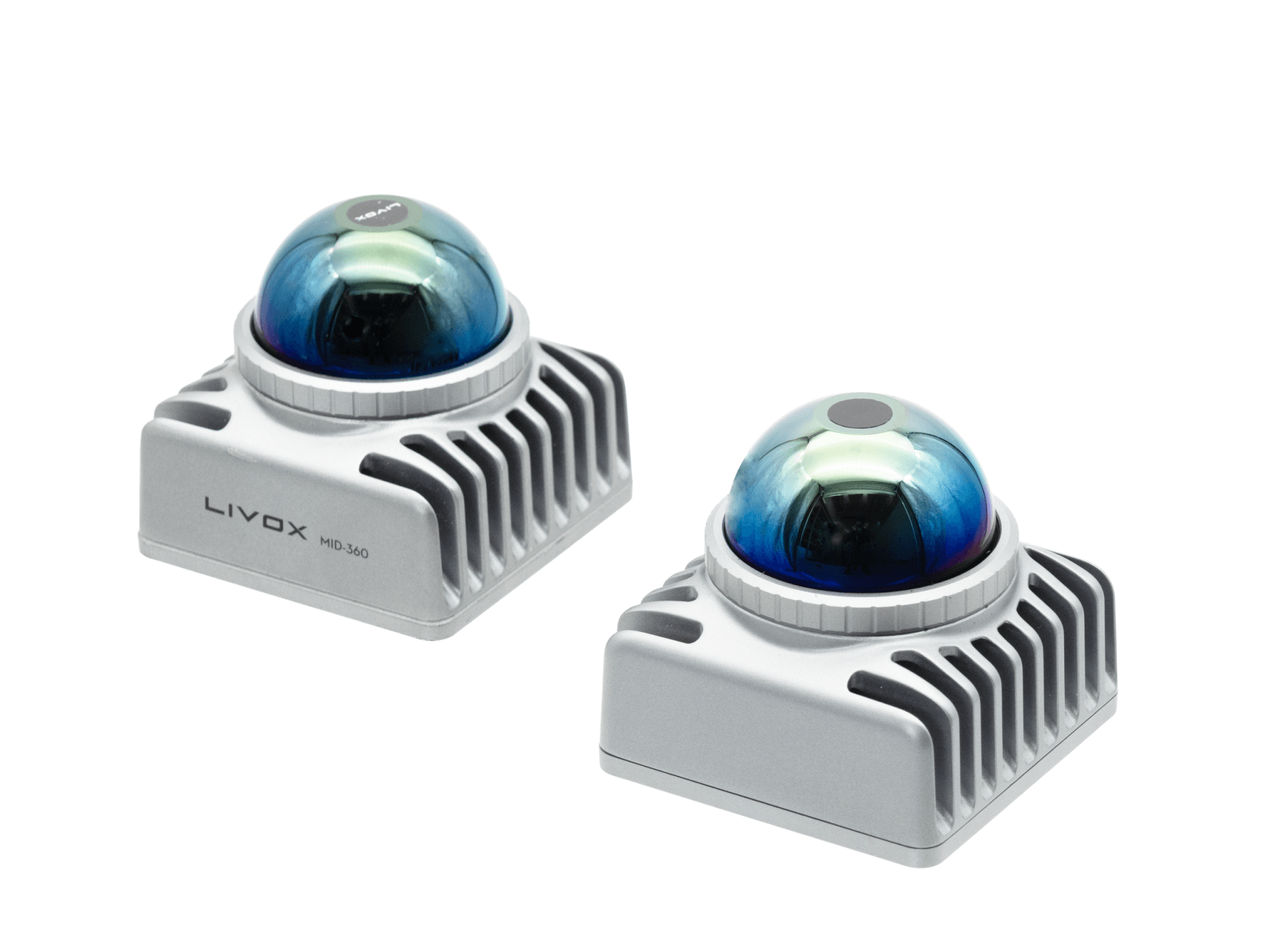
Mid-360 / Mid-360S| Livox
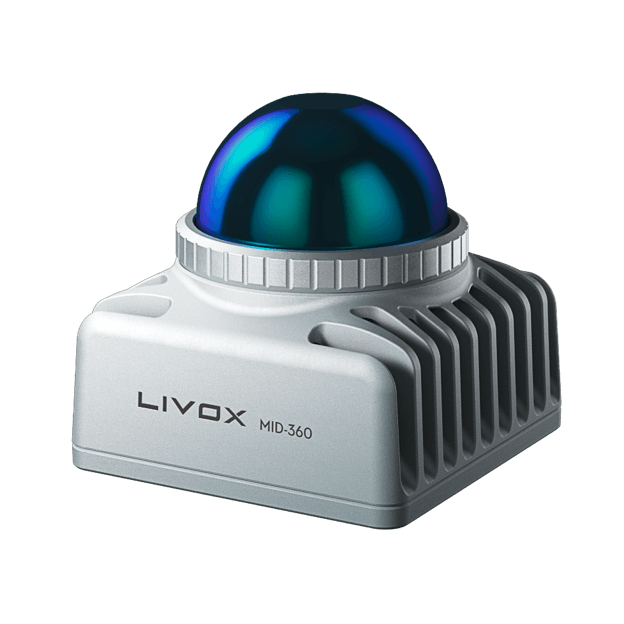
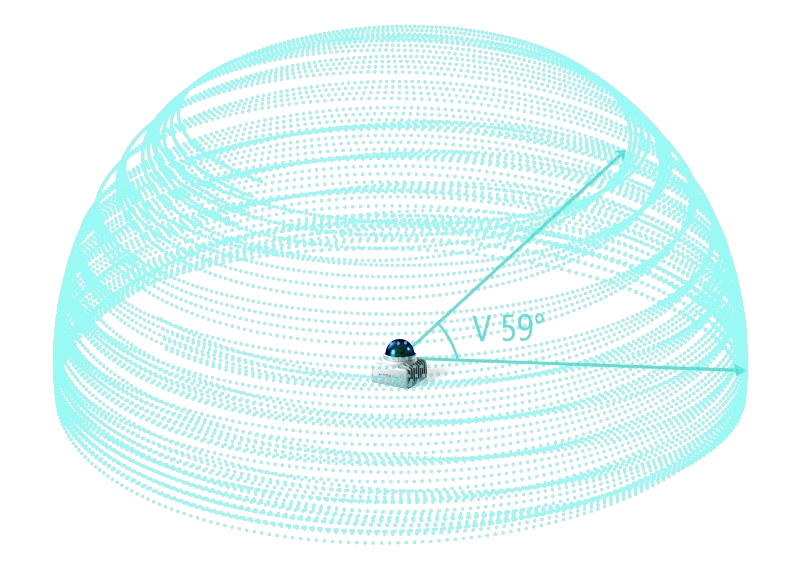
Livox の Mid-360 / 360S は水平360°、垂直59°(-7°〜52°)の広範囲な計測が可能な 3D LiDAR です。非常にコンパクトであらゆる場所にフレキシブルな設置が可能で、ロボットの外観設計に豊富な可能性を提供します。ロボットの移動、障害物回避などの利用シーンで必要とされる高次元の検知も十分考慮され、屋内外での使用に対応します。
Mid-360 / 360Sは、ROS /ROS 2(Robot Operating System)に対応しております。Livox SDKにて豊富な必須ツールを提供し、独自のアプリケーションやアルゴリズムの開発をサポートします。
- 検知範囲:
< Mid-360 > 40 m @ 反射率10%、70 m @ 反射率80%
< Mid-360S > 40 m @ 反射率 10%、100 m(カットオフ距離) - FOV:360°× 59°
- 点群密度:
< Mid-360 >40 line
< Mid-360S >20万点/秒 - ブラインドエリア:0.1m
- 幅 × 奥行 × 高さ(mm):65 × 65 × 60
- 重量:265g
- 主な用途:AGV/無人搬送車、AMR/自律走行搬送ロボット、
スマートロジスティクス、低速モビリティ、ロボティクス、点検(設備・地形)
即納可能大口対応可能デモ機あり
光響はLivoxの正規代理店のためメーカー定価よりお求めになりやすい価格をご案内できます。
Livox GitHub
3Dマッピング、SLAM [自己位置推定]、検知など、様々なサンプルプログラムが公開中
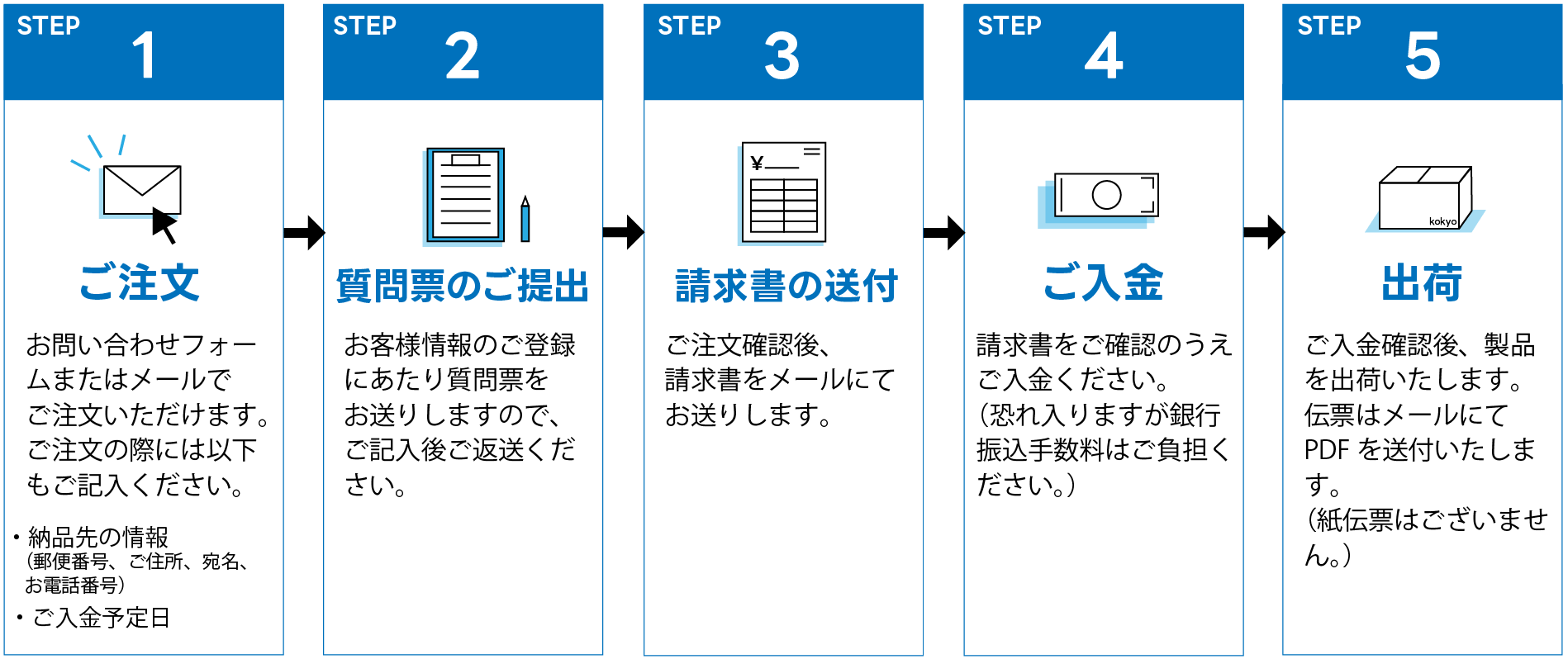
ご注文の流れ
LiDAR デモ機・レンタル機

Livox機種別接続方法について
Mid-360を含む、Livox各機種ごとの電源接続方法やPCへの接続方法を説明しています。接続方法でお困りの際はぜひこちらからご確認ください!

動画
30秒解説 Livox Mid-360
Livox公式: Unlock 3D Potential
Livox公式: Smart Logistics Unleashed
Livox公式: High-Speed Navigation in Total Darkness
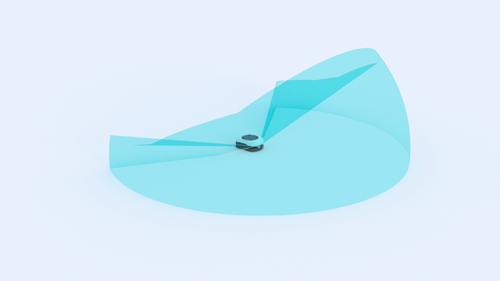
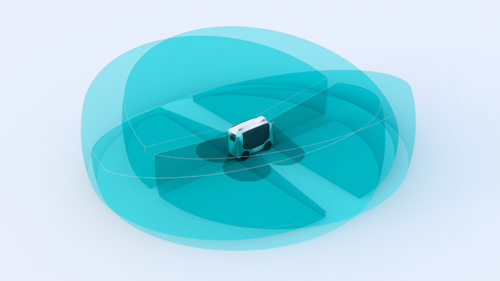
360°全周囲ウルトラワイド視野角
従来のメカニカルLiDARとは異なり、Mid-360 / Mid-360S は Livox 独自のハイブリッドソリッド技術を採用。初めて水平視野角を360°に広げたと同時に、垂直視野角も59°を実現。 Mid-360 / Mid-360S はこの広い視野角を用いて、移動ロボットの複雑な3D環境を感知において、ルート計算や判断に必要な豊富で全面的な点群データーを提供します。
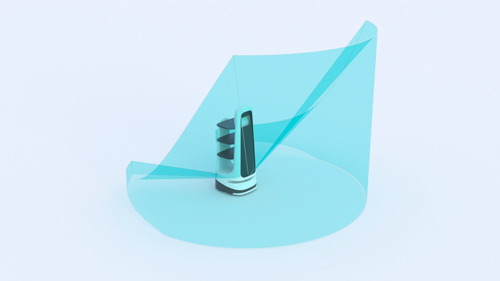
ブラインドエリアは小さく、性能は大きく
ブラインドエリア < 10cm
Mid-360 / Mid-360S の最短測定距離は10cm。コンパクトなボディを組み込み設置すれば、手軽にノンブラインドエリアを構築可能。
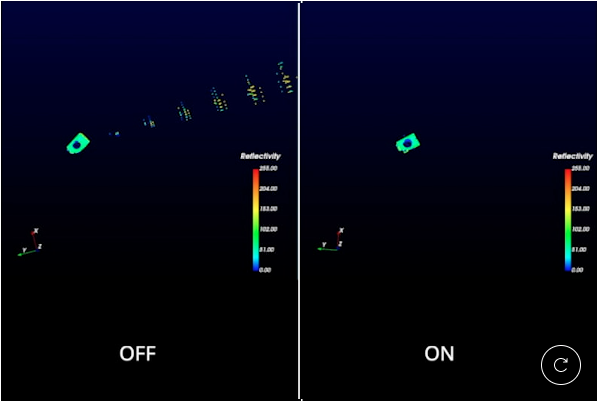
アクティブ干渉防止
Mid-360 / Mid-360S はアクティブ干渉防止対応、屋内複数複雑なLidar環境の中でもお互い干渉せず、安定作動が可能。
屋外強光対策
Mid-360 / Mid-360S は優れた性能を発揮し、暗い室内、明るい屋外でも70m@80%反射率の性能を有し、かつ暗い屋内、明るい屋外でも同じ性能を実現、シームレスに作動可能。
※Mid-360S は最大100 mの検知範囲(カットオフ範囲)を備えています。
推奨インストールソリューション
フォークリフト車

リフト式移動ロボット
サービスロボット
無人車
新種デバイス、幅広い利用シーン
従来のシングルLidar + TOFカメラ でナビゲーション及び障害物回避機能の開発に対し、 Mid-360 / Mid-360S の登場はロボットの周囲感知機能の開発において、全く新しい選択肢を提供することができます。 Mid-360 / Mid-360S は 360°x59° のウルトラワイドFOVを技術アドバンテージとして、3D区間における情報をより多く収集でき、作業の安全性、効率性を担保します。
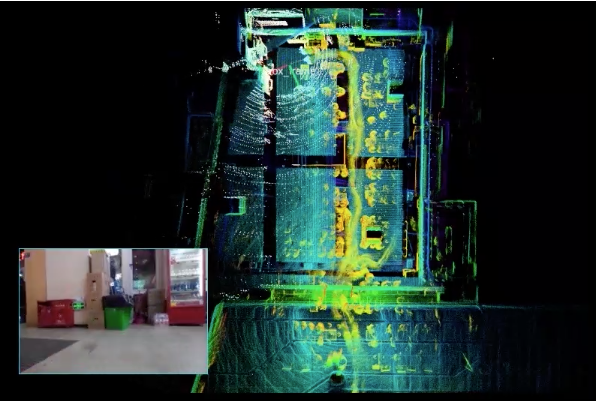
高い室内センシング性能による効率性の向上
2DシングルLidar と比較すると Mid-360 /Mid-360S は感知次元を3Dに拡大。環境特徴点の採集がより便利に、移動ロボットのマッピング作業効率は大幅にアップします。さらに Mid-360 /Mid-360S の角分解性能は時間積分につれ、精度はアップする。細かい障害部の感知力が大幅に改善、ロボット安全運営の保障役として期待できます。
屋内外兼用、更なる創造可能性
Mid-360 / Mid-360S は環境光の影響を受けません。暗い屋内廊下でも、光が強い屋外でも十分な点群を確保でき、ロボットのナビケーション、障害物回避機能を保障します。 さらに一部タグ付け分類作業も対応可能、ロボットの潜在能力を引き出します。

Mid-360 利用事例
SLAM動画使用事例
Mid-360を使ったSLAM動画
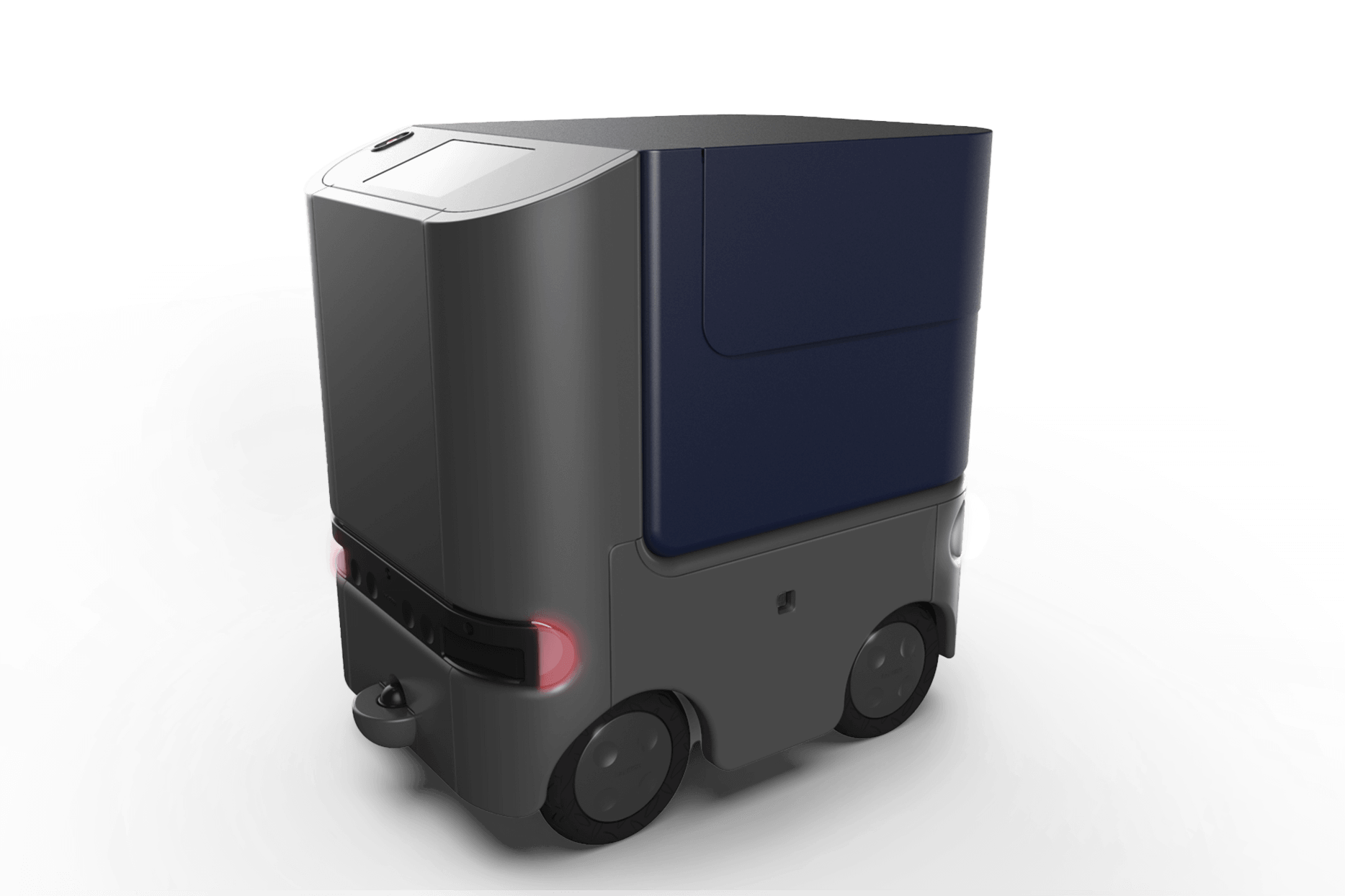
小型自動配送ロボットの使用事例
Mid-360を搭載した自動配送ロボットで低速・小型の自動配送ロボットとして、公道での100kgの荷物を搬送する実験を行いました。
Mid-360 / Mid-360S 仕様比較
仕様表
| モデル | Mid-360 | Mid-360S |
|---|---|---|
| レーザー波長 | 905nm | 905nm |
| レーザーの安全性¹ | クラス 1 (IEC60825-1:2014) (Eye Safety) | クラス 1 (IEC60825-1:2014) (Eye Safety) |
| 検出範囲 (@ 100 klx) | 40 m @ 反射率 10% 70 m @ 反射率 80% |
40 m @ 反射率 10% 100 m(カットオフ距離) |
| 近接ブラインドゾーン² | 0.1 m | 0.1 m |
| FOV | 水平: 360°、垂直: -7°~52° | 水平: 360°、垂直: -7°~52° |
| 範囲精度³ (1σ) | ≤ 2 cm ⁴ (@ 10m) ≤ 3 cm ⁵ (@ 0.2m) |
≤ 2 cm ⁴ (@ 10m) ≤ 4 cm ⁵ (@ 0.2m) |
| 角度精度(1σ) | 0.15º | 0.15º |
| ポイント率 | 200,000 ポイント/秒 (ファーストリターン) | 200,000 ポイント/秒 (ファーストリターン) |
| フレームレート | 10 Hz(代表値) | 10 Hz(代表値) |
| データポート | 100BASE-TX イーサネット | 100BASE-TX イーサネット |
| データ同期 | IEEE 1588-2008 (PTPv2)、GPS | IEEE 1588-2008 (PTPv2)、GPS |
| 干渉防止機能 | 利用可能 | 利用可能 |
| 誤警報率 (@ 100 klx) ⁶ | < 0.01% | < 0.01% |
| IMU | 内蔵 IMU モデル: ICM40609 | 内蔵 IMU モデル: ICM40609 |
| 動作温度 | -4°F~131°F (-20℃~55℃)⁷ | -4°F~131°F (-20℃~55℃)⁷ |
| IP 評価 | IP67 | IP67 |
| パワー⁸ | 6.5 W(平均) | 6.5 W(平均) |
| Motor Slow Mode⁹ | ‐ | ◯ |
| 電源電圧範囲 | DC9~27 V | DC9~27 V |
| 寸法(W×D×H) コネクタの突起部を除く |
65×65×60 mm | 65×65×60 mm |
| 重さ | 265 g | 265 g |
注)
[1] 内蔵レーザーの発散角は25.2°(水平)×8°(垂直)で、半値全幅で測定された値です。内蔵レーザーの最大出力は70 Wを超える場合があります。レーザーによるけがを避けるため、Mid-360/Mid-360S は絶対に分解しないでください。
[2] Mid-360/Mid-360S から0.1〜0.2 m以内の対象物を検出し、点群データを記録できます。ただし、検出精度は保証できないため、データはあくまで参考値としてご利用ください。
[3] 検出範囲内で異なる反射率を持つ物体を検出する場合、特定の位置における点群データの精度がわずかに低下する可能性があります。
[4] Mid-360/Mid-360S から10 mの距離にある反射率80%の対象物を25℃の環境下でテストを実施しました。
[5] Mid-360/Mid-360S から0.2 m離れた反射率80%の対象物を、25℃の環境下でテストを実施しました。Mid-360/Mid-360S から0.1~1 mの範囲内にある対象物については、反射率が低いものや薄くて小さいものは、検出効果は保証できません。これらの物体には、黒色のフォーム、水面、研磨されたもの、マット仕上げの物体、細い線などが含まれますが、これらに限定されるものではありません。
[6] 25°Cのテスト環境下で、100 klxの迷光によって発生するノイズの誤警報率。
[7] Mid-360/Mid-360S の性能は、高温または低温環境、強い振動や濃霧のある環境などではわずかに低下する可能性があります。また、高温下で長時間動作させると性能に悪影響を及ぼし、製品の永久的な損傷につながる場合があります。シェルの温度が80°Cを超えないように、余分の放熱対策を施すことを推奨します。高温になると高温保護機構が作動し、Mid-360/Mid-360S が警告を発します。Mid-360/Mid-360S は、過熱になった場合に自動的に運転を停止します。
[8] -20°Cから0°Cの周囲温度の場合、Mid-360/Mid-360S は自動的に自己加熱モードに入り、ピーク電力は14Wに達することがあります。LiDARセンサーが正常に動作するよう、電源設計を適切に行ってください。
[9] Motor Slow Modeは、図書館・病院などの静かな屋内環境での手持ち測量や、芝刈りロボット帰還時など、動作音・振動を抑えたい用途向けの設定です。Slowではポイントレートは変わらず、角度分解能のみ変化し、垂直方向のレーザーラインがやや少なく見える場合があります。
Livoxロゴ
Mid-360Sでは製品に入っていたロゴがなくなりました。
| Mid-360 | Mid-360S | |
|---|---|---|
| 保護カバー シール(頭頂部) | ロゴあり | 無地 |
| 側面ロゴ | あり | なし |

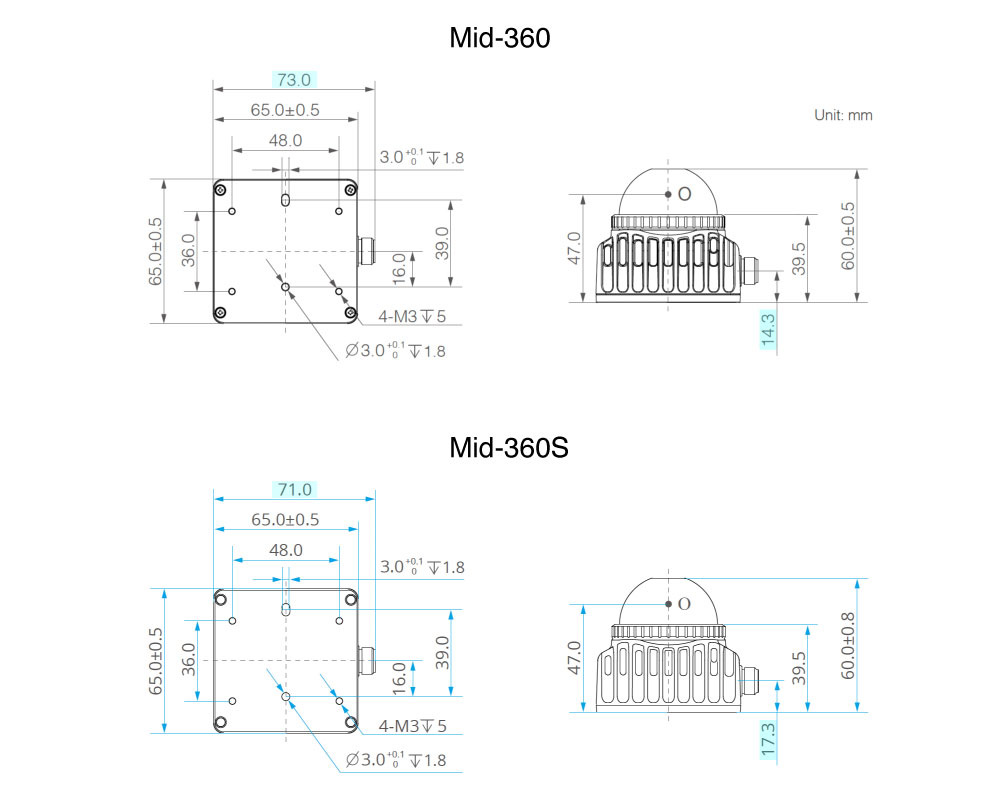
コネクタについて
Mid-360とMid-360Sではコネクタ部の位置が変更されています。
| Mid-360 | Mid-360S | |
|---|---|---|
| コネクタ突出寸法 | 8 mm | 6 mm(2 mm短縮) |
| コネクタ垂直位置 | 14.3 mm | 17.3 mm(3 mm上方に移動) |

Viewer/SDKについて
Mid-360Sでは、LivoxのWEBサイトから最新のViewer / SDKをダウンロードの上ご利用ください。
※Mid-360S発売前に公開されたViewer、SDK、ROSドライバはご利用いただけません
Mid-360は、2026年5月現在の最新版Viewer/SDKにも対応しております。
※今後のソフトウェア更新への対応を保証するものではありません

オプションについて
Mid-360Sは、Mid-360と同様に下記のオプション製品を利用できます。
- AC電源アダプター
- 3線式航空コネクター
- M12航空コネクタ 延長ケーブル(1 m)
- M12航空コネクタ 延長ケーブル(5 m)

Mid-360 / 360S用オプション
Livox AC電源アダプター
この電源アダプターは、Livox LiDARユニットの3種類のモデル(Avia / Mid-70 / Tele-15)に対応しています。
PSEの認証は取得済みです。ACアダプターの本体にマークを付けております。
※ Livox本体にはAC電源アダプターは付属しておりません。
※ 3線式航空コネクターとアダプターの接続には、コネクタ変換処理が必要です。
即納可能
同封物
- Huntkeyアダプター × 1
- AcBel 電源アダプター ACケーブル × 1
- 電源アダプターコネクター × 1
仕様
- 入力電圧:100VAC~240VAC、50Hz~60Hz
- 出力電圧:12 V
- 定格電力: 84 W
- 動作環境温度:0° ~ 40° C
(Mid-360 / 360S用)3線式航空コネクター
Livox Mid-360 /360S 用Livox 3線式航空コネクターは、一方の端がM12航空コネクター(メス)、もう一方が電源、イーサネット、および機能ケーブルコネクターで構成されています。Livox 製品とそのコネクターをM12コネクター(オス)を使用して接続すると、世界中で使用されているLivox 製品のデバッグ処理が迅速に実行できます。
※AviaやMid-70など、M12航空コネクタタイプのLivoxでもご利用頂けます。
即納可能
※オプション製品のみの場合、別途送料が発生します
同封物
- 航空コネクター電源ネットワークポートケーブル×1
仕様
- 長さ: 1.5 m(Mid-360 用)
M12航空コネクタ延長ケーブル(1m or 5m)

Mid-360などM12航空コネクタタイプのLivoxでご利用頂けます。
同封物
- M12航空コネクタ延長ケーブル(1m or 5m)
※長さ:1m or 5m どちらかお選びください。