Livox 機種別接続方法について

Mid-360/Mid-360Sについて

Mid-360/Mid-360S(製品ページ)
電源への接続手順
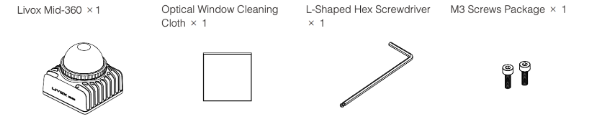
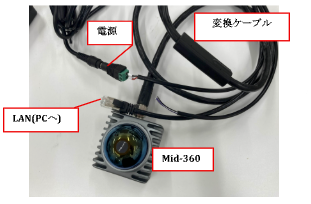
付属品
別途必要
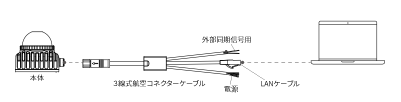
電源ケーブル、Livox 3線式航空コネクターなどの電源供給用ユニット、通信ケーブル ※ 3線式コネクタは通信(LANケーブル)を含む
例 Livox 3線式航空コネクター+ACアダプタ+(変換アダプタ)の3点
3線式航空コネクターケーブルとACアダプタの接続は、配線の加工か接続アダプタが別途必要になります。画像は3線側の先になります。電源(赤黒)はACアダプタの丸型プラグに適合するように加工済みですが、標準は未加工の状態です。

PCへの接続手順
- パソコンに「Livox Viewer 2」をインストールします。
- 電源への接続手順を参考にパソコンとLANケーブルを接続します。
- IPアドレスの設定
- Mid-360/Mid-360Sは、デフォルトで静的IPアドレスモードに設定されています。
・IPアドレス; 192.168.1.1XX(XXはセンサーのシリアル番号の下2桁)
・デフォルトサブネットマスク;255.255.255.0
・デフォルトゲートウェイ;192.168.1.1 - パソコン側のIPアドレスも静的IPに変更する必要があります。
・設定から「ネットワークとインターネット」をクリックして開きます。
・右側の『イーサーネット』をクリックし、『IP割り当て』の右側にある『編集』をクリックします。
・IPv4(オン状態)のIPアドレスに192.168.1.50(下2桁はシリアル番号以外の数字を入れて下さい)に設定し、
サブネットマスクは255.255.255.0に設定します。
・「OK」をクリックして完了します。 - Livox Viewer 2での動作確認
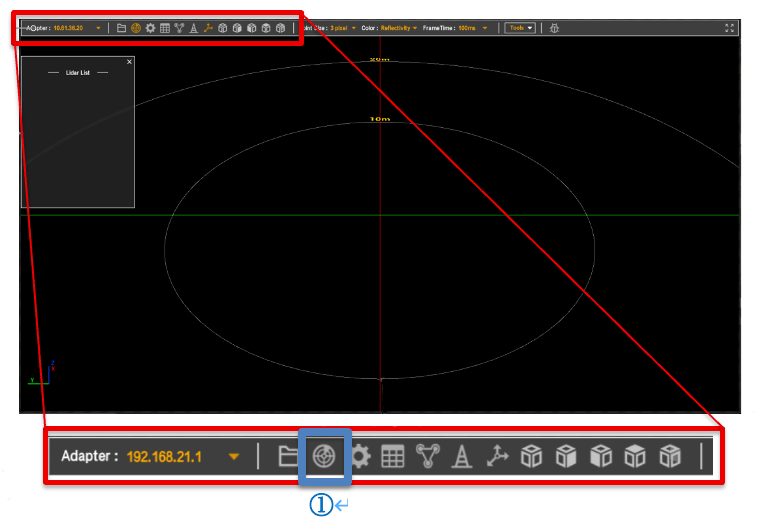
- Livox Viewer 2を起動します。
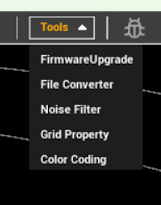
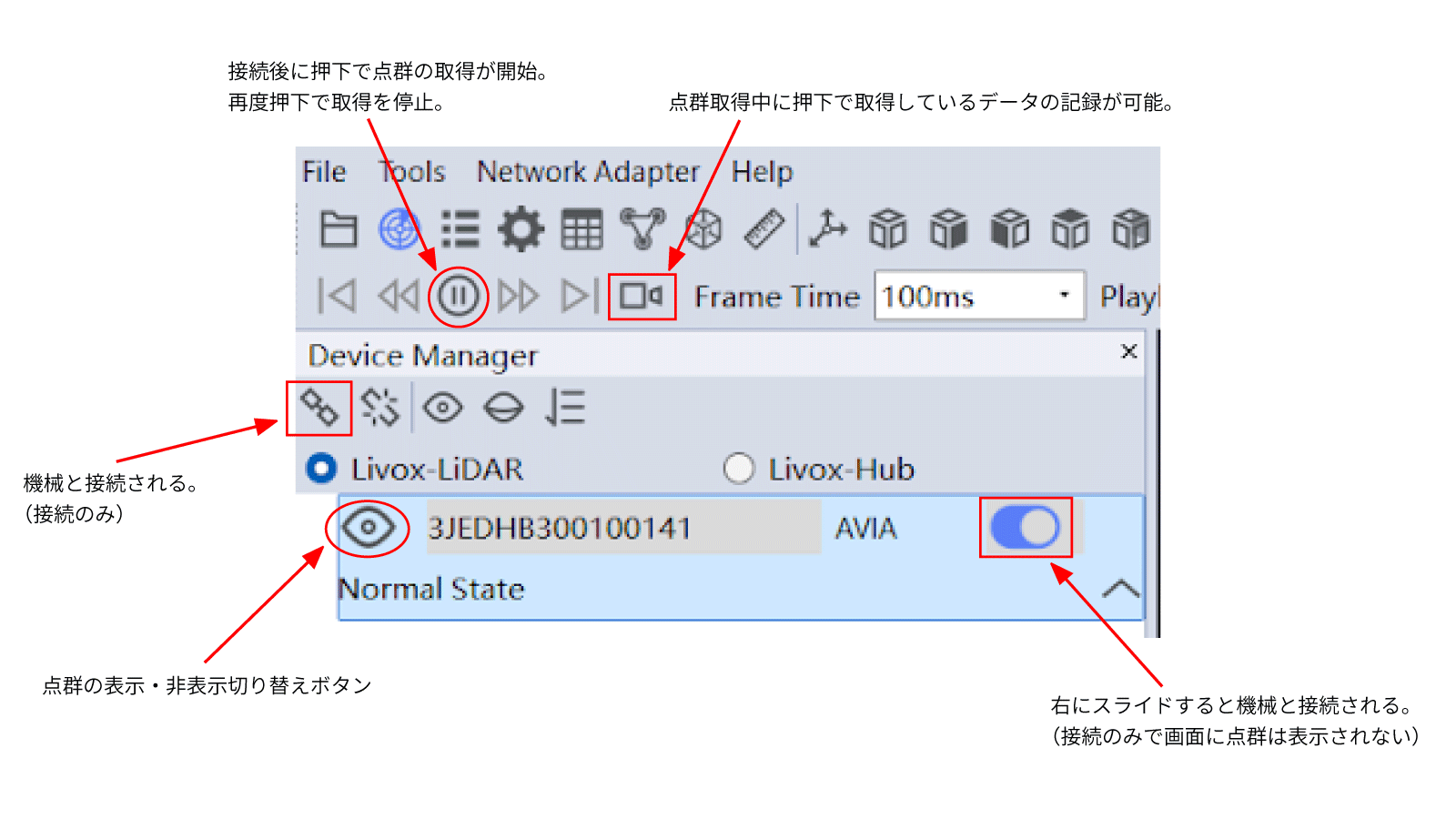
- 上図①を押すと下図のような「LiDAR List」(検出したデバイスの情報と関連する制御ボタンリスト)が立ち上がります。
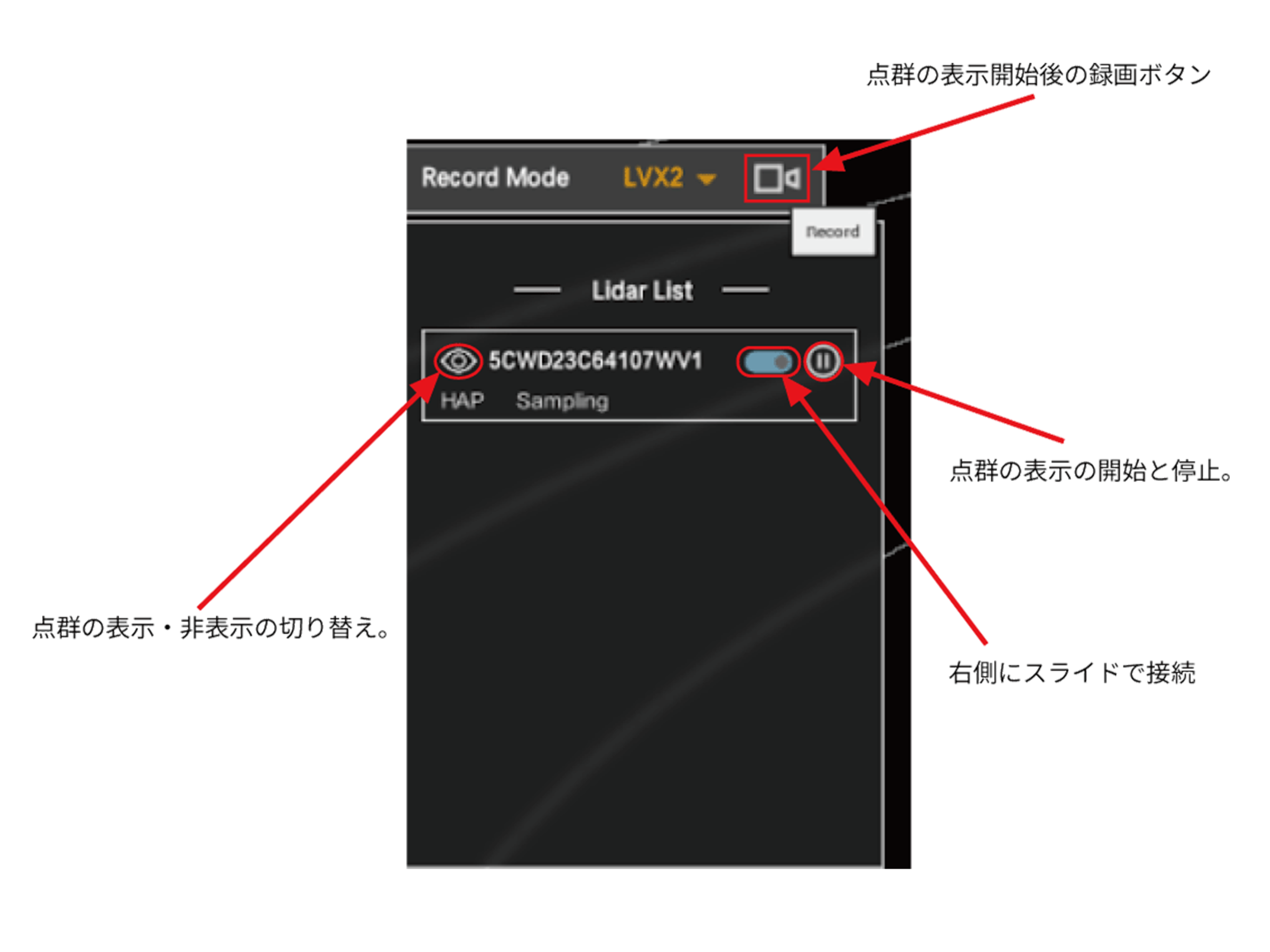
- LiDAR List にあるボタンを使って接続と点群の表示ができます。
接続が正しくできていれば、デバイスの情報と関連する制御ボタンが、表示されます。Listに表示されていない場合は、IPの設定を再度ご確認下さい。 - データの出力方法
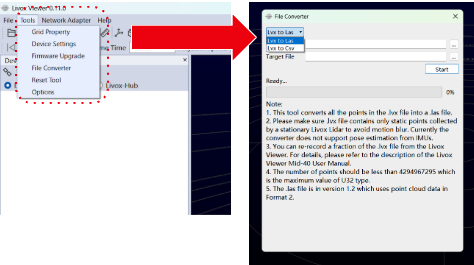
・記録されたデータは、自動(.lvx)で保存されます。汎用形式で出力したい場合は、「Tool」→「File Converter」変換する必要があります。対応する出力形式はlas,csv,pcd形式になります。
(※Windows11環境の場合)
HAP(TX)について
HAP(TX)(製品ページ)
電源への接続手順
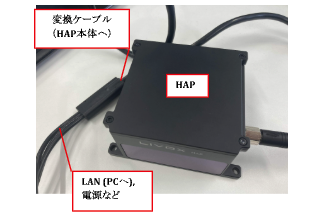
付属品

別途必要
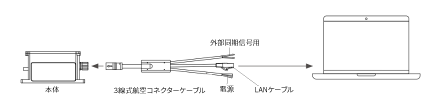
電源ケーブル、Livox 3線式航空コネクターなどの電源供給用ユニット、通信ケーブル※3線式コネクタは通信(LANケーブル)を含む
例 Livox 3線式航空コネクター+ACアダプタ+(変換アダプタ)の3点
3線式航空コネクターケーブルとACアダプタの接続は、配線の加工か接続アダプタが別途必要になります。画像は3線側の先になります。電源(赤黒)はACアダプタの丸型プラグに適合するように加工済みですが、標準は未加工の状態です。
PCへの接続手順
- パソコンに「Livox Viewer 2」をインストールします。
- 電源への接続手順を参考にパソコンとLANケーブルを接続します。
- IPアドレスの設定
- HAPは、デフォルトで静的IPアドレスモードに設定されています。
・IPアドレス; 192.168.1.100
・デフォルトサブネットマスク;255.255.255.0
・デフォルトゲートウェイ;192.168.1.1 - パソコン側のIPアドレスも静的IPに変更する必要があります。
・設定から「ネットワークとインターネット」をクリックして開きます。
・右側の『イーサーネット』をクリックし、『IP割り当て』の右側にある『編集』をクリックします。
・IPv4(オン状態)のIPアドレスに192.168.1.50(下2桁は100以外の数字)に設定し、
サブネットマスクは255.255.255.0に設定します。
・「OK」をクリックして完了します。 - Livox Viewer 2での動作確認
- Livox Viewer 2を起動します。
- 上図①を押すと下図のような「LiDAR List」(検出したデバイスの情報と関連する制御ボタンリスト)が立ち上がります。
- LiDAR List にあるボタンを使って接続と点群の表示ができます。
接続が正しくできていれば、デバイスの情報と関連する制御ボタンが、表示されます。Listに表示されていない場合は、IPの設定を再度ご確認下さい。 - データの出力方法
・記録されたデータは、自動(.lvx)で保存されます。汎用形式で出力したい場合は、「Tool」→「File Converter」変換する必要があります。対応する出力形式はlas,csv,pcd形式になります。
(※Windows11環境の場合)
注)HAPは、スタートを押すまで起動しません。
Mid-70について

Mid-70(製品ページ)
電源への接続手順
付属品
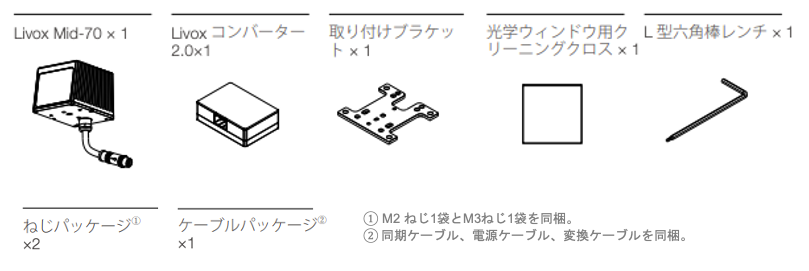
別途必要
ACアダプタなどの電源供給用ユニット
例 ACアダプタ
電源の供給にはACアダプタが必要です。PoE接続はサポートしておりません。
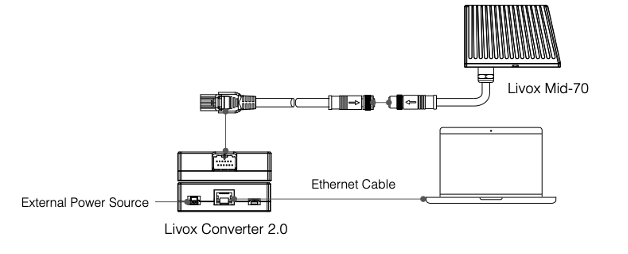
PCへの接続手順
- パソコンに「Livox Viewer 0.11」をインストールします。
- 電源への接続手順を参考にパソコンとLANケーブルを接続します。
- IPアドレスの設定
- Mid-70は、デフォルトで静的IPアドレスモードに設定されています。
・IPアドレス; 192.168.1.1XX(XXはセンサーのシリアル番号の下2桁)
・デフォルトサブネットマスク;255.255.255.0
・デフォルトゲートウェイ;192.168.1.1 - パソコン側のIPアドレスも静的IPに変更する必要があります。
・設定から「ネットワークとインターネット」をクリックして開きます。
・右側の『イーサーネット』をクリックし、『IP割り当て』の右側にある『編集』をクリックします。
・IPv4(オン状態)のIPアドレスに192.168.1.50(下2桁はシリアル番号以外の数字を入れて下さい)に設定し、
サブネットマスクは255.255.255.0に設定します。
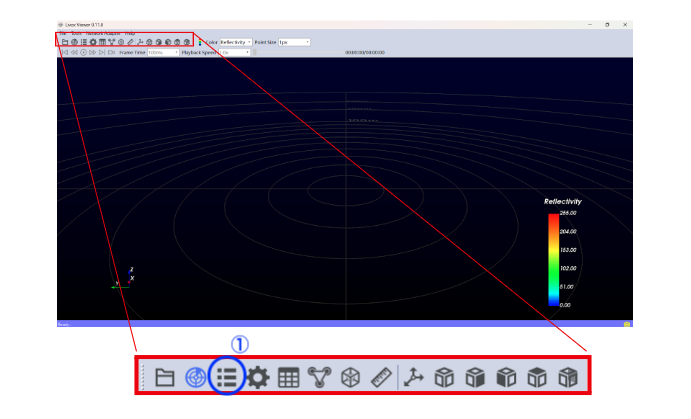
・「OK」をクリックして完了します。 - Livox Viewer 0.11での動作確認
- 上図①を押すと下図のような画面で接続されている機器の一覧が表示されます。
- データの出力方法
・記録されたデータは、Record File Pathで指定した場所に自動(.lvx)で保存されます。汎用形式で出力したい場合は、「Tool」→「File Converter」でlas形式とcsv形式に変換する必要があります。
(※Windows11環境の場合)
Aviaについて

Avia(製品ページ)
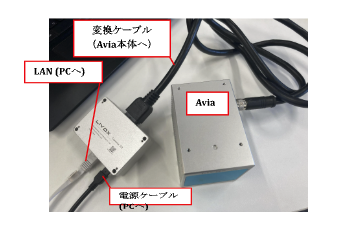
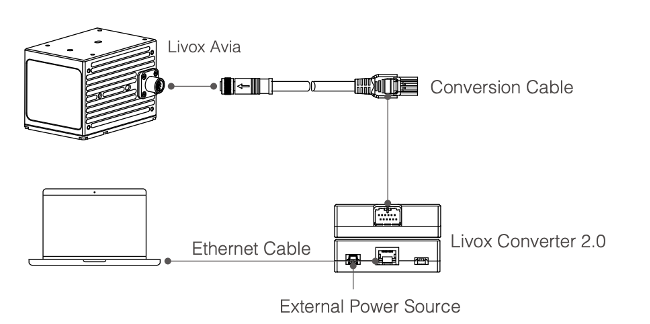
電源への接続手順
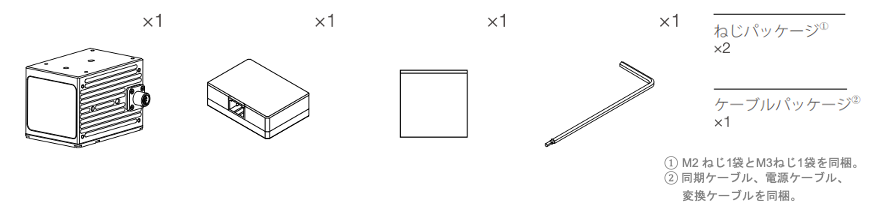
付属品
別途必要
ACアダプタなどの電源供給用ユニット
例 ACアダプタ
電源の供給にはACアダプタが必要です。PoE接続はサポートしておりません。
PCへの接続手順
- パソコンに「Livox Viewer 0.11」をインストールします。
- 電源への接続手順を参考にパソコンとLANケーブルを接続します。
- IPアドレスの設定
- Aviaは、デフォルトで静的IPアドレスモードに設定されています。
・IPアドレス; 192.168.1.100
・デフォルトサブネットマスク;255.255.255.0
・デフォルトゲートウェイ;192.168.1.1 - パソコン側のIPアドレスも静的IPに変更する必要があります。
・設定から「ネットワークとインターネット」をクリックして開きます。
・右側の『イーサーネット』をクリックし、『IP割り当て』の右側にある『編集』をクリックします。
・IPv4(オン状態)のIPアドレスに192.168.1.50(下2桁は100以外の数字)に設定し、
サブネットマスクは255.255.255.0に設定します。
・「OK」をクリックして完了します。 - Livox Viewer 0.11での動作確認
- 上図①を押すと下図のような画面で接続されている機器の一覧が表示されます。
- データの出力方法
・記録されたデータは、Record File Pathで指定した場所に自動(.lvx)で保存されます。汎用形式で出力したい場合は、「Tool」→「File Converter」でlas形式とcsv形式に変換する必要があります。
(※Windows11環境の場合)
Tele-15について

Tele-15(製品ページ)
電源への接続手順
電源の供給にはACアダプタが必要です。PoE接続はサポートしておりません。
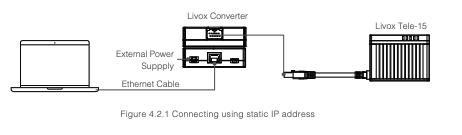
PCへの接続手順
- パソコンに「Livox Viewer 0.11」をインストールします。
- 電源への接続手順を参考にパソコンとLANケーブルを接続します。
- IPアドレスの設定
- Tele-15は、動的IPモードと静的IPモードの2種類のIP設定に対応しています。
初期設定では以下の通りとなっています。(静的IPモード)
・IPアドレス:192.168.1.1XX(XXはTele-15のシリアル番号の下2桁)
・デフォルトサブネットマスク;255.255.255.0
・デフォルトゲートウェイ;192.168.1.1 - 初回使用時はLivox Tele-15をパソコンへ直接接続してください。静的IPと動的IPでは接続方法が異なります。
・静的IPモードでは、Tele-15をパソコンへ直接接続でき、Livox ViewerまたはSDKを使って任意の静的IPアドレスを設定できます。
・動的IPアドレスで接続するには、Livox ViewerまたはSDKを利用してTele-15を動的IPモードへ切り替えてください。動的アドレスモード時は、DHCPによりIPアドレスが自動割り当てされます。 - お使いのコンピューターのIPアドレスを固定IPに設定する手順は以下の通りです。
・コントロールパネル内の「ネットワークと共有センター」を開きます。
・利用中のネットワークを選択し、「プロパティ」をクリックします。
・「インターネット プロトコル バージョン4 (TCP/IPv4)」をダブルクリックしてください。
・コンピューターのIPアドレスを「192.168.1.50」、サブネットマスクを「255.255.255.0」に設定します
・「OK」で確定します。
(※Windows11環境の場合) - Livox Viewer 0.11での動作確認
- 上図①を押すと下図のような画面で接続されている機器の一覧が表示されます。
トラブルシューティング
- ケーブル接続を再確認してください。
- ネットワーク設定(IPアドレス)を同一セグメントに設定してください。
- ファイアウォールやウイルス対策ソフトを一時的に無効化してください。
- 電源アダプタの出力(電圧・電流)が仕様を満たしているか確認してください。
- 必要電流に対して容量不足のアダプタを使用していないか確認してください。
- 別のLANポートやUSBポートに接続して再試行してください。
- 最新版のLivox Viewerを使用してください。
- WindowsのファイヤーウォールでLivoxViewerが許可されていない
・ファイアウォールの設定で接続が許可されていない場合、たとえ接続自体ができていても点群が表示されないことがあります。その場合、ファイアウォールの設定を「許可」に変更してご利用ください。また、セキュリティソフトウェアを導入されている場合は、そちらの設定も合わせて「許可」に変更する必要がある場合があります。 - IPアドレス設定が接続しているLANアダプタでできていない
・LANアダプタは、ケーブル接続のため、Wi-fiのIPアドレスではなくケーブル接続側のIPアドレスを変更する必要があります。また、デスクトップなどLANアダプタが複数ある機器をお使いの場合は、接続されているLANアダプタでIPアドレスの変更をして下さい。 - LiDAR本体と同じIPアドレスをパソコン側でも指定している。
・IPアドレスは、LiDAR本体とパソコン側で異なる変更する必要があります。
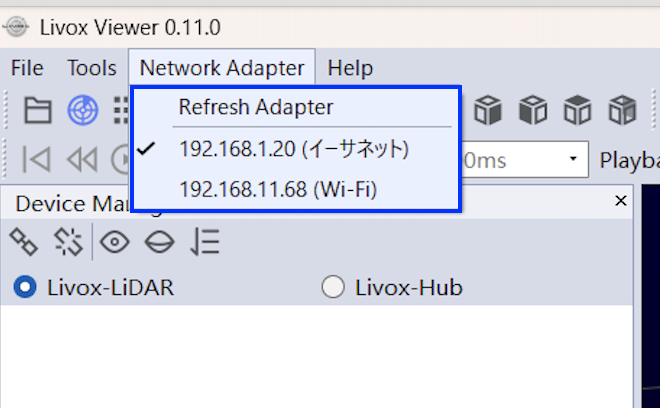
「192.168.1.xx」3項目目までは同じにする必要がありますが、4項目はLiDAR本体とパソコン側は異なる数字を入力する必要があります。 - Viewerを起動後などにIPアドレスを変更すると、認識できない場合があります。IPアドレスの設定に問題がないのに接続できない場合は、以下の場所で「Refresh Adapter」をお試し下さい。
Livox Viewer 2の場合

Livox Viewer 0.11の場合
(※詳細なセンサー仕様については付属の「製品仕様書」を参照してください。複数台のセンサーを同時接続する場合は、IPアドレスの重複にご注意ください。)