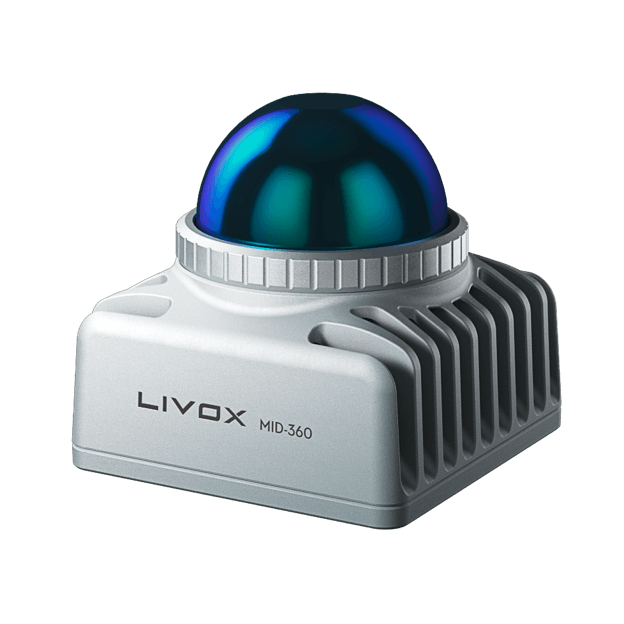
Livox Mid-360をROS2で動かす|SDK2・UDP・RVizの構成とセットアップ
この環境を導入することのメリット
Livox Mid-360 を Ubuntu + ROS2 環境で構築することで、単なる点群確認にとどまらず、開発・システム連携まで対応可能になります。
- カスタマイズ可能な開発環境: 一般的なViewerとは異なり、取得データの処理や制御を自由にカスタマイズできるため、研究開発やシステム構築に適した柔軟な環境を実現できます。
- 自律走行・SLAMへの対応:単なる点群の可視化にとどまらず、ロボット制御や地図作成(SLAM)の基盤となる環境を構築できます。
- 開発効率の向上:検証実績のある Ubuntu 22.04 + ROS2(Humble)環境を利用することで、初期設定にかかる手間を削減し、スムーズな開発スタートが可能です。
- 高度なシステム連携:世界標準のロボットミドルウェアであるROS2を採用することで、カメラ・IMU・AIなど他センサーとの統合や拡張が容易になります。
Livox Viewer 2との違い
Viewer 2は『点検・視聴用』ですが、この手順で作る環境は『開発・組み込み用』のプロ仕様です。
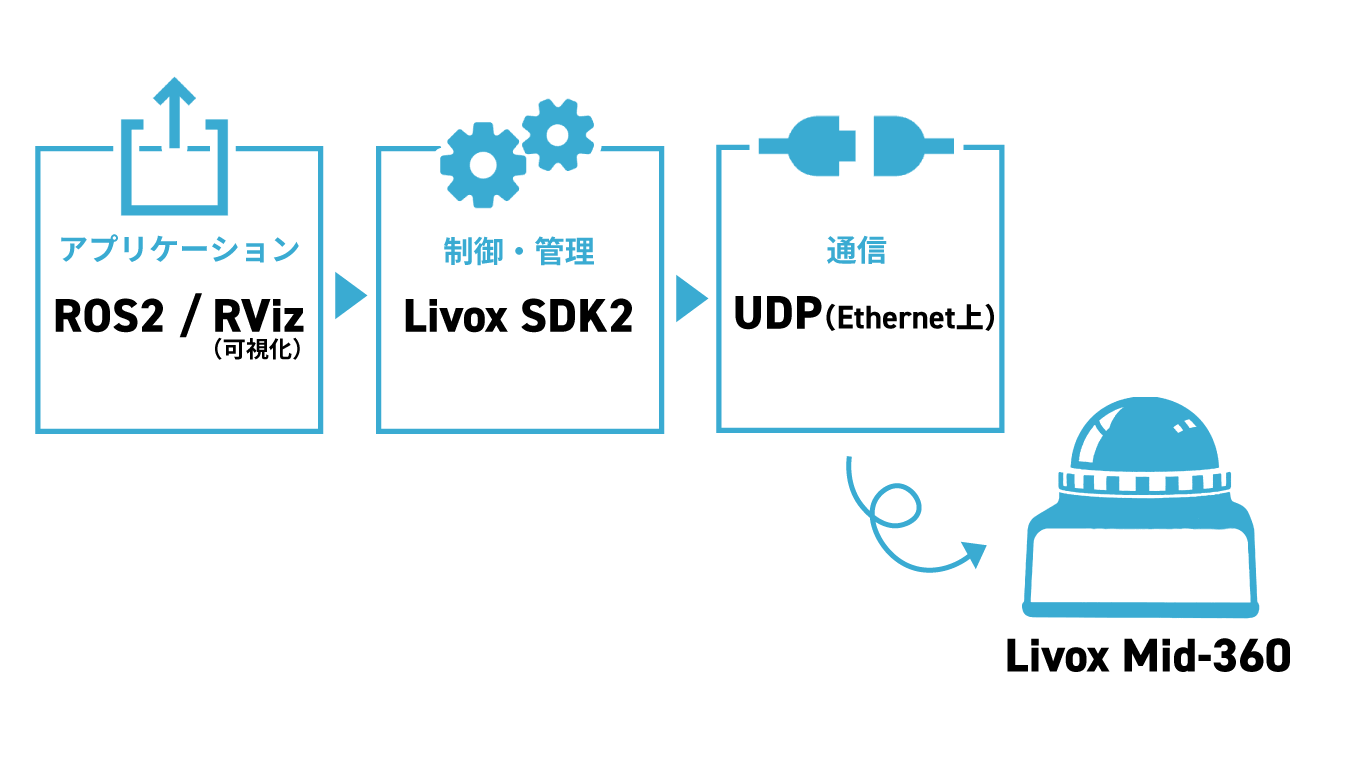
- Livox SDK2【心臓部】: センサーを直接動かし、データを吸い上げる。
- ROS2【共通言語】: 吸い上げたデータを、ロボットやAIが理解できる形に直す。
- RViz【モニター】:翻訳されたデータを、開発者が確認するために映し出す画面。
ソフトウェア構成は次のようになっています。
まとめ
Livox Mid-360は、Livox SDK2とROS2を組み合わせることで、Linux環境上で効率的に利用できるLiDARです。
本構成では、それぞれが次の役割を担います。
- UDP:点群データの通信
- SDK2:LiDARの制御・管理
- ROS2:アプリケーション連携
- RViz:点群の可視化
この構成により、ロボット・自動運転・研究用途などでリアルタイム3D点群を活用したシステム構築が可能になります。
Ubuntu 22.04 LTSをダウンロードして、パソコン内のハードを分割して、Linux環境を導入
- ターミナルを起動し、以下より ROS 2 Humble (Desktop Full)を導入します。
-
公式手順:
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html - インストール後、ROS環境を読み込みます。
source /opt/ros/humble/setup.bash
Livox Mid-360 ROS2セットアップ手順
・UbuntuでRVizに点群を表示する方法
Livox Mid-360は、Livox SDK2とROS2を組み合わせることで簡単に点群データを取得・可視化できます。
ここでは Ubuntu Linux上でROS2(Humble)を利用し、RVizで点群を表示する基本手順を紹介します。
ROS2 Humbleのインストール
Ubuntuのターミナルを起動し、以下の公式手順に従って ROS2 Humble(Desktop Full) をインストールします。
・公式手順
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
Ubuntu Universeリポジトリが有効になっていることを確認し、
→apt を使用して ROS 2 GPG キーを追加
→リポジトリをソースリストに追加
インストール完了後、ROS環境を読み込みます。
source /opt/ros/humble/setup.bash
Livox SDK2のインストール
次に、Livox LiDARを制御するための Livox SDK2 をインストールします。
・公式GitHub
https://github.com/Livox-SDK/Livox-SDK2
・以下のコマンドでダウンロードします。
git clone https://github.com/Livox-SDK/Livox-SDK2.git
・ダウンロード後、SDKをビルドしておきます。Livoxの公式 README では、ws_livox/src/livox_ros_driver2 配下に clone すること、そしてその workspace で build / source することが推奨されています
cd **/Livox-SDK2/
mkdir build
cd build
cmake .. && make -j4
sudo make install
livox_ros_driver2 のインストール
ROS2からLivox LiDARを扱うために、livox_ros_driver2 を導入します。
・公式GitHub
https://github.com/Livox-SDK/livox_ros_driver2
cd **/ros2/humble/ws_livox
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
cd **/ros2/humble/ws_livox/livox_ros_driver2
source /opt/ros/humble/setup.sh
./build.sh humble
・ビルドの終了後、setupファイルを読み込みます。
source ~/ros2/humble/install/setup.sh
LiDARのIP設定
以下の設定ファイル(.json)にMid-360のIPが格納されているので、PC側の設定を変更したくない場合は、書き換えるか、新しい.jsonのファイルを作成し、保存します。
**/Livox-SDK2/samples/livox_lidar_quick_start/mid360_config.json
Mid-360のIPは、192.168.1.1** となり、**はシリアルナンバーの下2桁が入ります。
PCとLiDARが同一ネットワークに設定されていることを確認してください。
RViz(可視化ツール)起動
IP設定が確認できたら、以下のコマンドでLivoxドライバを起動します。
ros2 launch livox_ros_driver2 rviz_MID360_launch.py
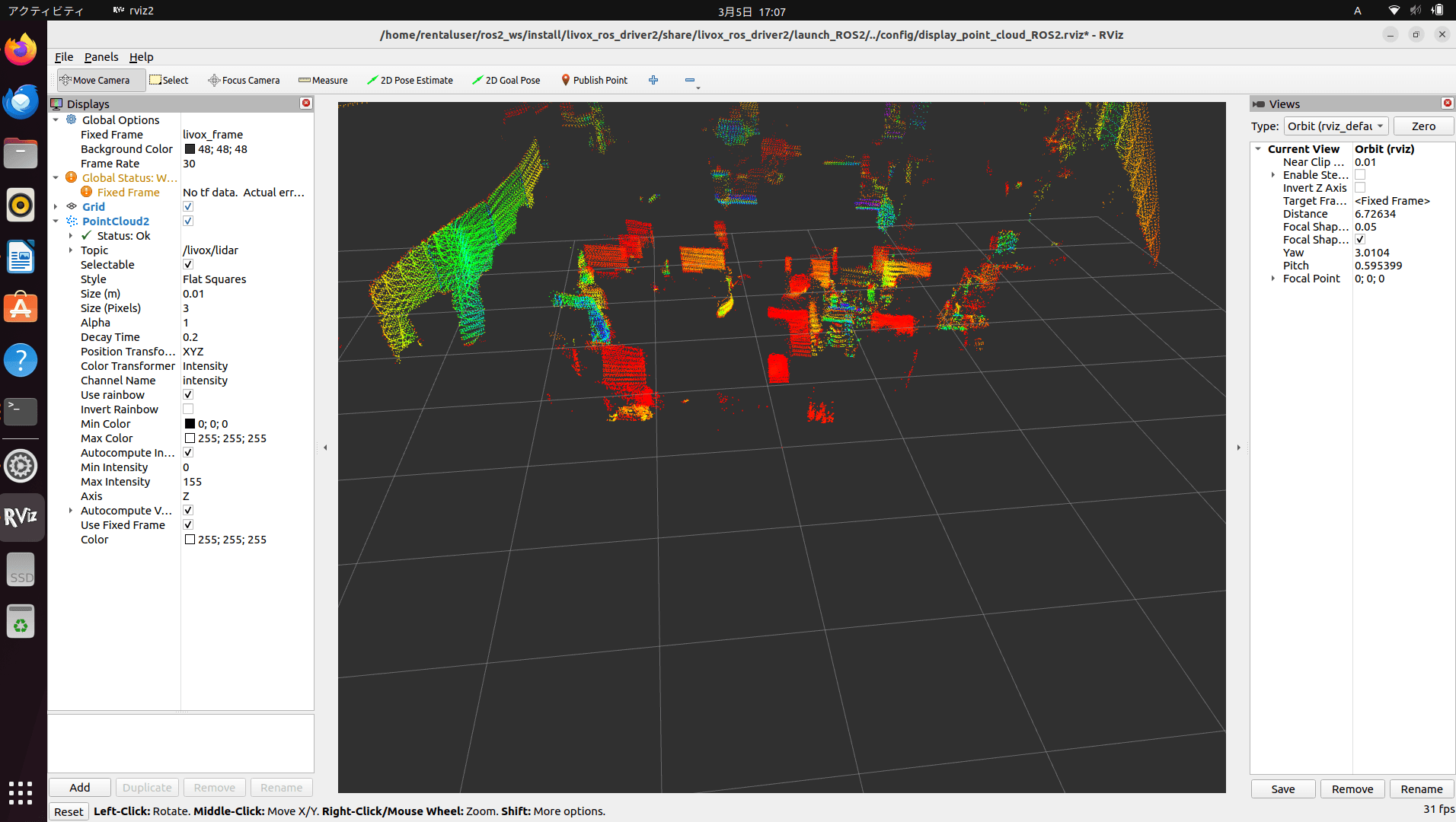
RVizによる点群表示
ドライバが正常に起動すると、RVizが起動し、LiDARの点群データをリアルタイムで表示できます。