バックパック型LiDAR・レーザードローンを使用したこれまでのデモ関連
デモ1:京都府亀岡市 / 亀岡国際広場球技場の様子
| 場所 | 京都府亀岡市 / 亀岡国際広場球技場 |
|---|---|
| 実施日 | 2017年9月1日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
| 詳細 | |
| 参考 | Optinewsの紹介記事 |
デモ動画

デモ画像
デモ2:ジャパンドローン展示会 / 幕張メッセの展示会場の様子
| 場所 | 東京都 / 幕張メッセ ジャパンドローン展示会場 |
|---|---|
| 実施日 | 2018年3月22日(木)〜24日(土) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | – |
| 詳細 | 展示会場を5分間歩いただけで、下の3Dマッピングが得られます。 |
| 参考 | 展示会の様子 |
デモ動画
デモ3:ドローン研究会 / 京都府立ゼミナールハウスの様子
| 場所 | 京都府 / 京都府立ゼミナールハウス |
|---|---|
| 実施日 | 2018年4月14日(土)〜 15日(日) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
| 詳細 | バックパック型LiDARを背負って40分間歩いただけで、下の3Dマッピングが得られます。 |
| 参考 | ドローン研究会の様子 optinewsの紹介記事 |
デモ動画
デモ画像
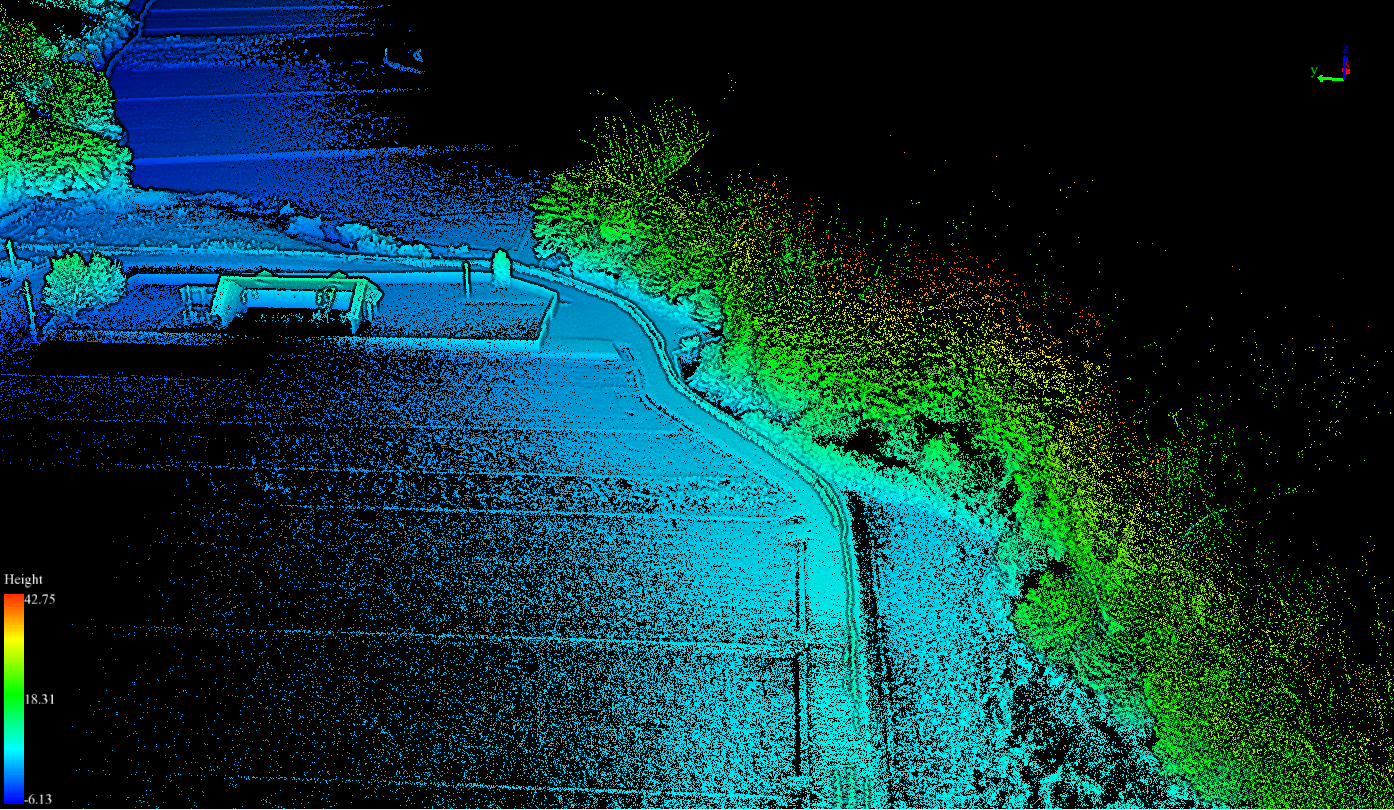
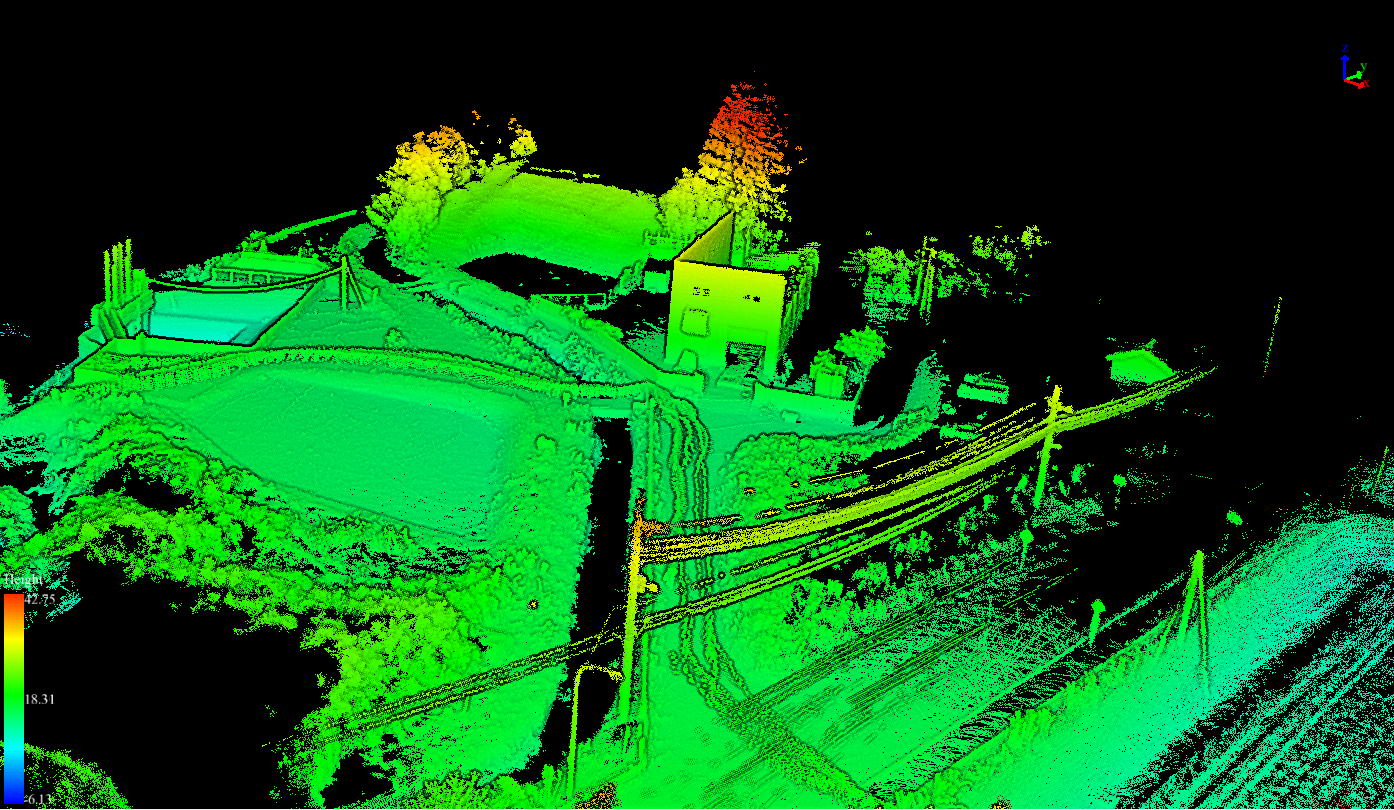
デモ4:茨城県那珂市下江田 / その周辺の様子
| 場所 | 茨城県那珂市下江田 / 周辺 |
|---|---|
| 実施日 | 2018年4月10日(火) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
| 詳細 | バックパック型LiDARを背負って40分間歩いただけで、下の3Dマッピングが得られます。 |
| 参考 |
デモ動画


デモ画像
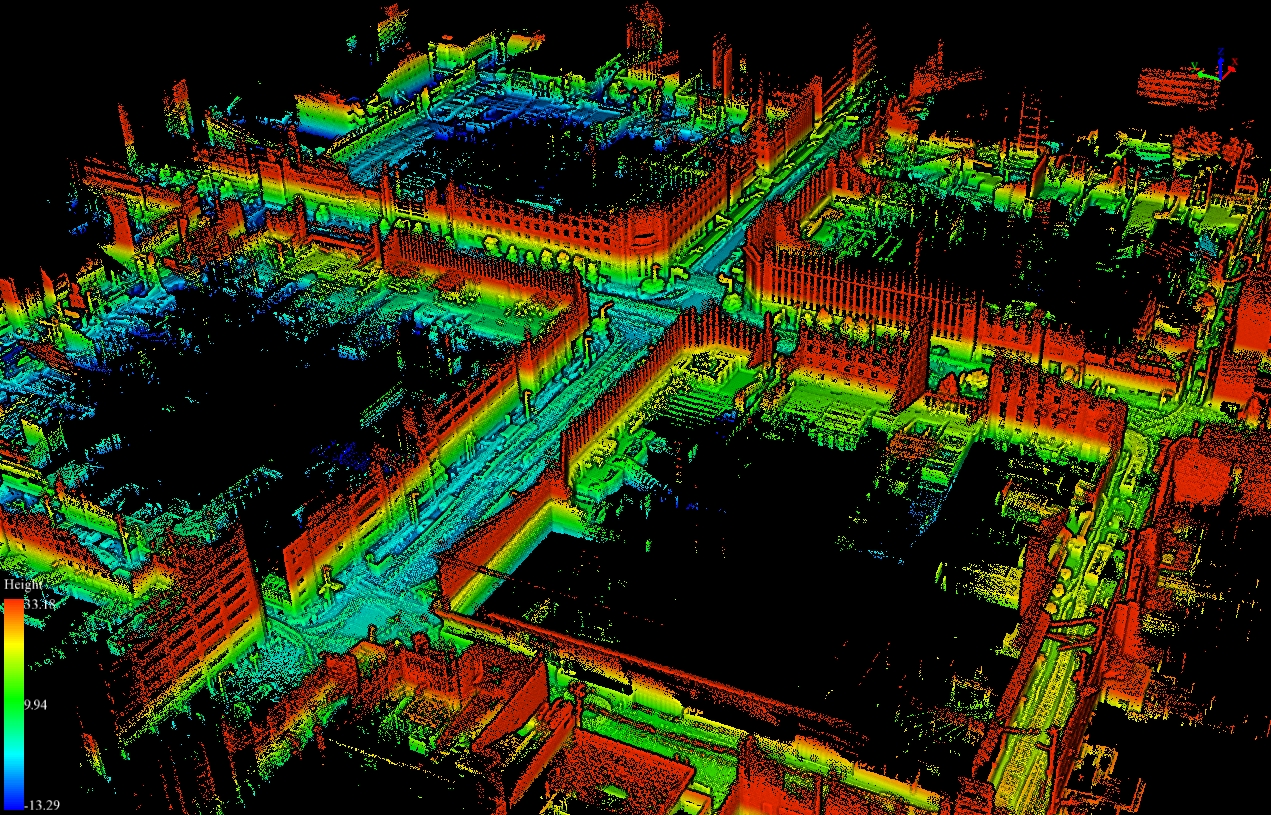
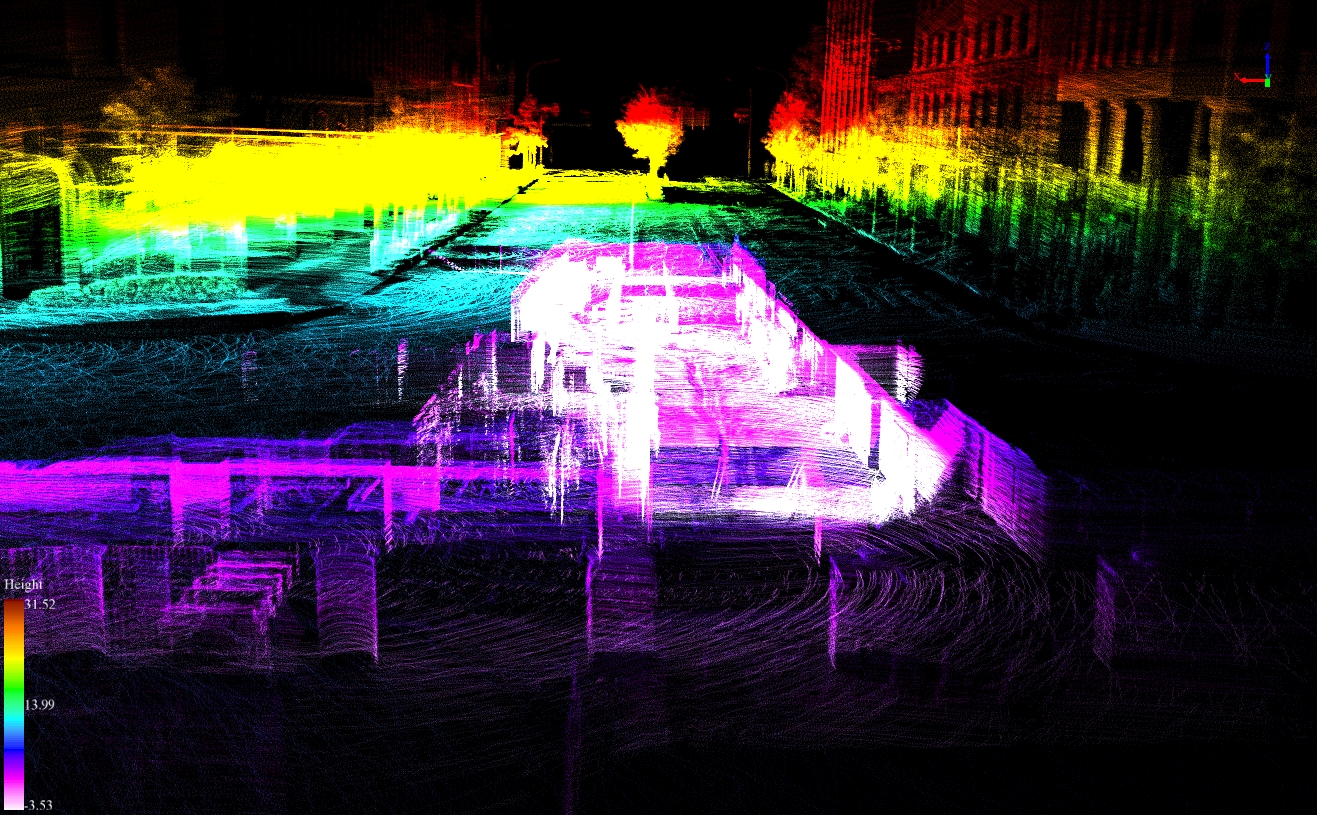
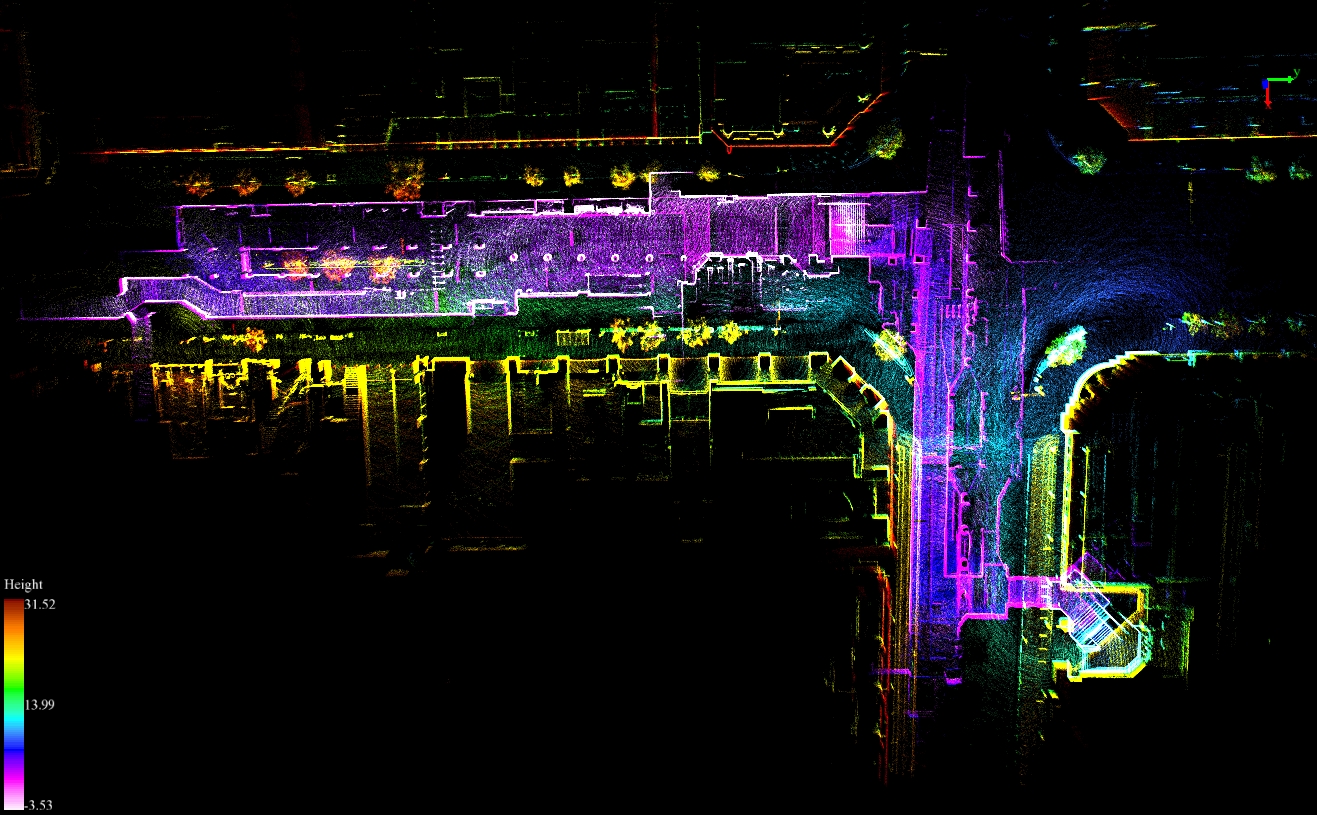
デモ5:京都市内 / 四条烏丸交差点(光響周辺)の様子
| 場所 | 京都市下京区 / 四条烏丸交差点周辺 |
|---|---|
| 実施日 | 2018年5月28日(月) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
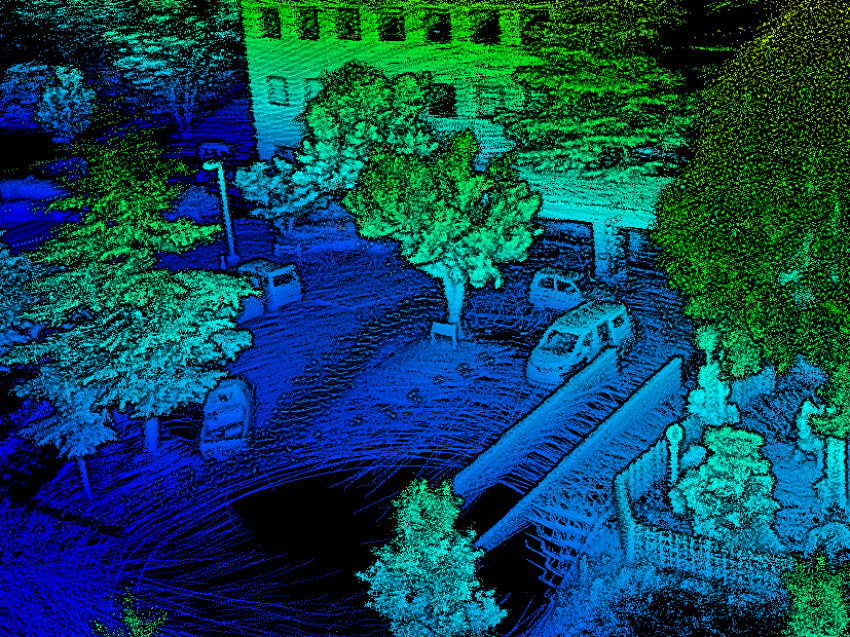
| 詳細 | 四条烏丸のオフィス街。光響のあるオフィスビル周辺のマッピングです。 ドローンを飛ばせないところでも簡単に3次元マッピングができます。 |
| 参考 | Optinewsの紹介記事 |
デモ動画
デモ画像
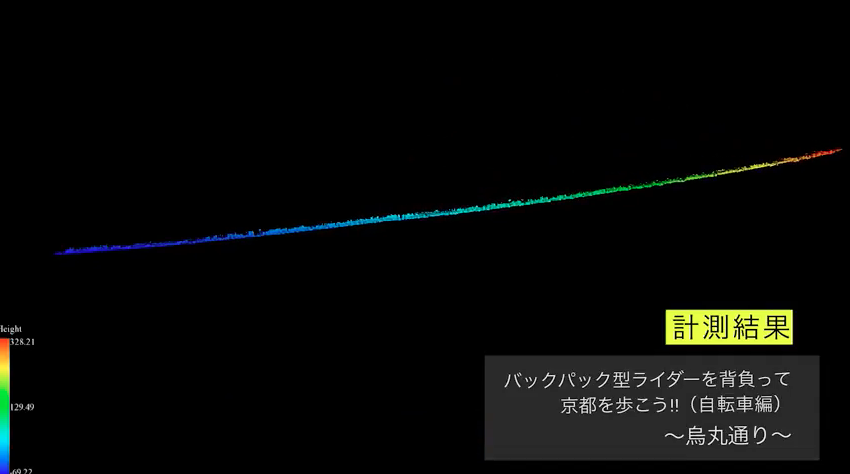
デモ6:京都市内 / 烏丸通り(京都駅〜今出川)の様子
| 場所 | 京都市 / 烏丸通り(京都駅〜今出川) |
|---|---|
| 実施日 | 2018年5月22日(火) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
| 詳細 | 京都駅から今出川まで約3kmを自転車でサイクリングしながらマッピング。 自転車に乗っていても綺麗に3Dマッピングができます。 京都駅と今出川の標高差は約25mあることが分かります。 |
| 参考 | Optinewsの紹介記事 |
デモ動画

デモ画像
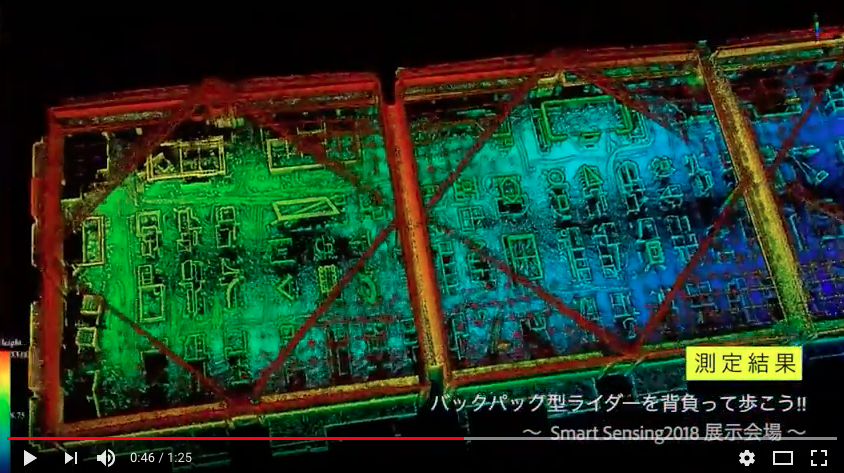
デモ7:スマートセンシング展示会 / 東京ビッグサイトの展示会場の様子
| 場所 | 東京都 / 東京ビッグサイト スマートセンシング展示会 |
|---|---|
| 実施日 | 2018年6月6日(水)〜8日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | – |
| 詳細 | GPSが届かない建物の中でも簡単に3Dマッピングができます。 |
| 参考 | Smart Sensing 2018展示会の様子 |
デモ動画

デモ画像
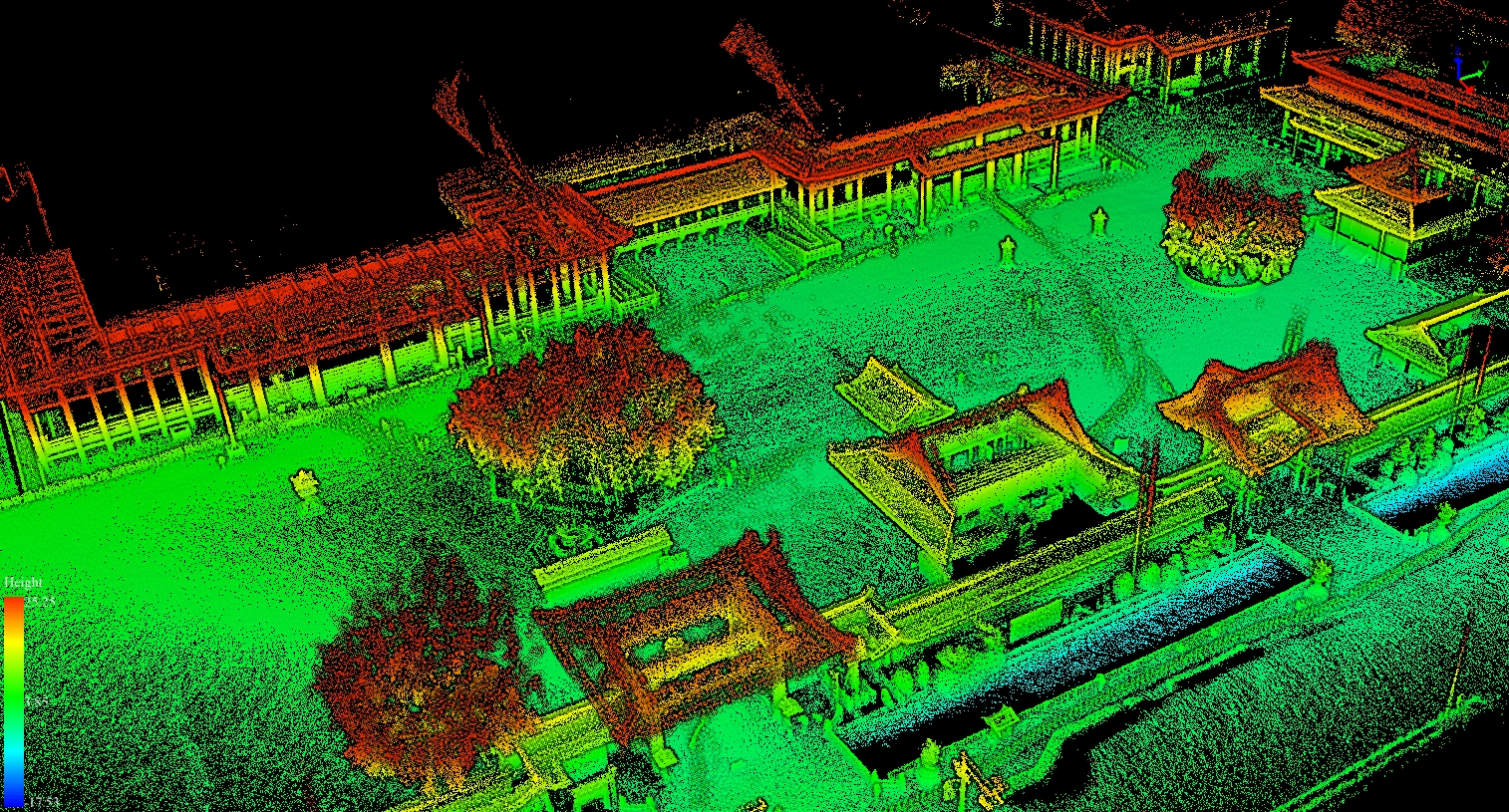
デモ8:京都市内 / 西本願寺の様子
| 場所 | 京都市下京区 / 西本願寺 |
|---|---|
| 実施日 | 2018年6月12日(火) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
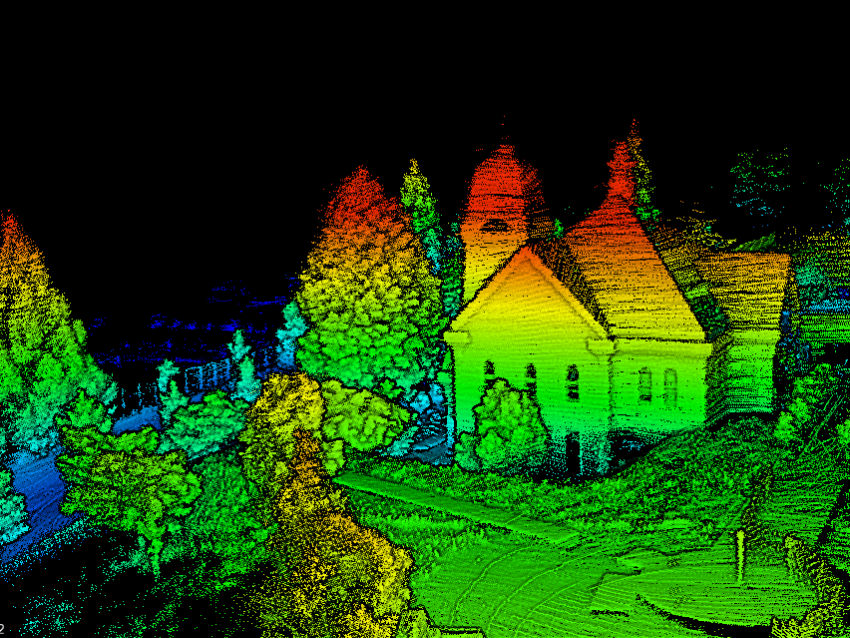
| 詳細 | 西本願寺様にご協力をいただき測定させていただきました。 |
| 参考 | Optinewsの紹介記事 |
デモ動画

デモ画像
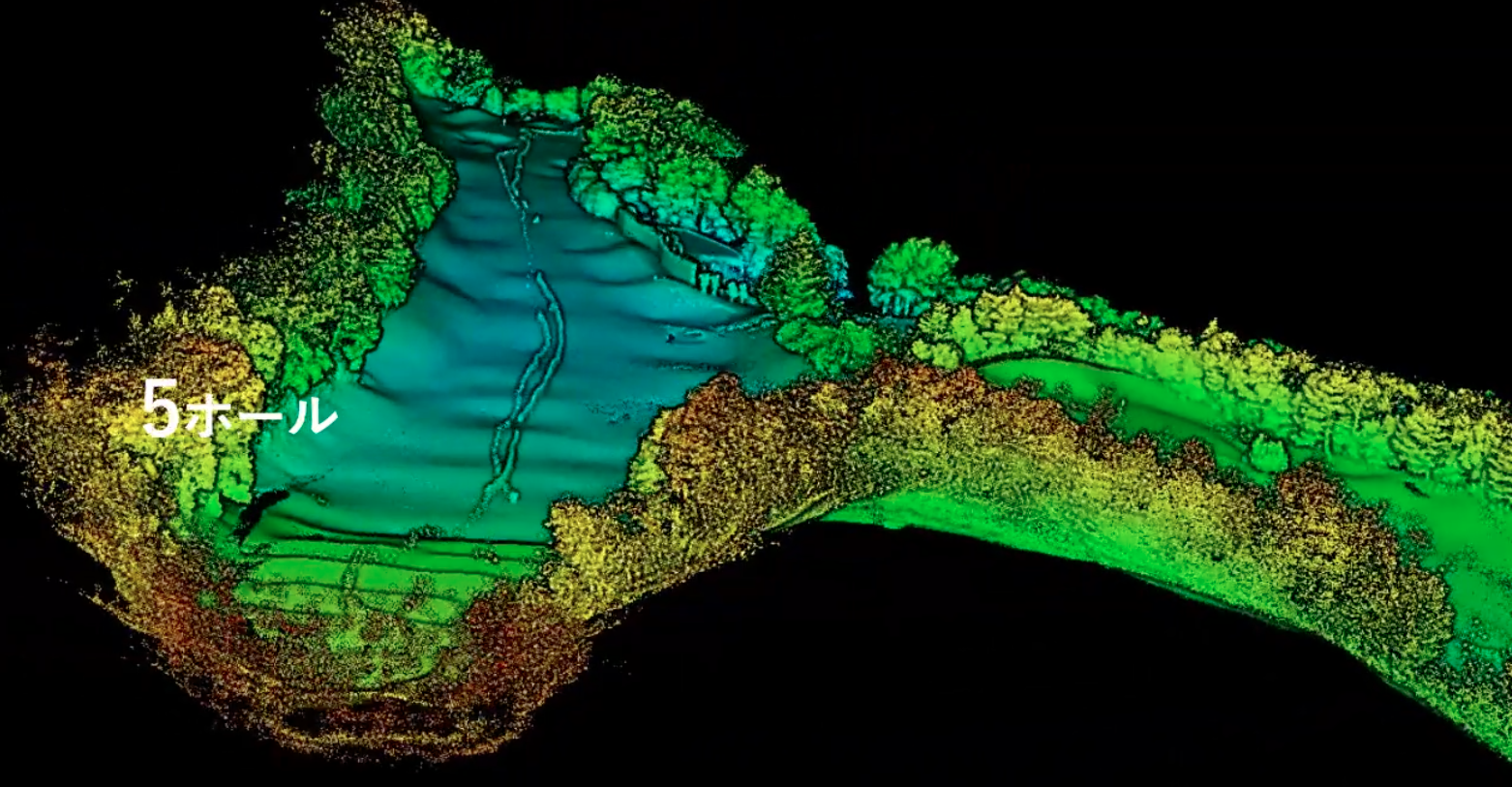
デモ9:日清都カントリークラブ / ゴルフ場の様子
| 場所 | 京都府宇治市 / 日清都カントリークラブ 醍醐コース |
|---|---|
| 実施日 | 2018年6月25日(月) |
| 使用ツール | バックパック型LiDAR / Libackpack(旧モデル) |
| 天候 | 晴れ |
| 詳細 | 日清都カントリークラブ様にご協力をいただき測定させていただきました。 |
| 参考 | Optinewsの紹介記事 |
デモ動画

デモ画像
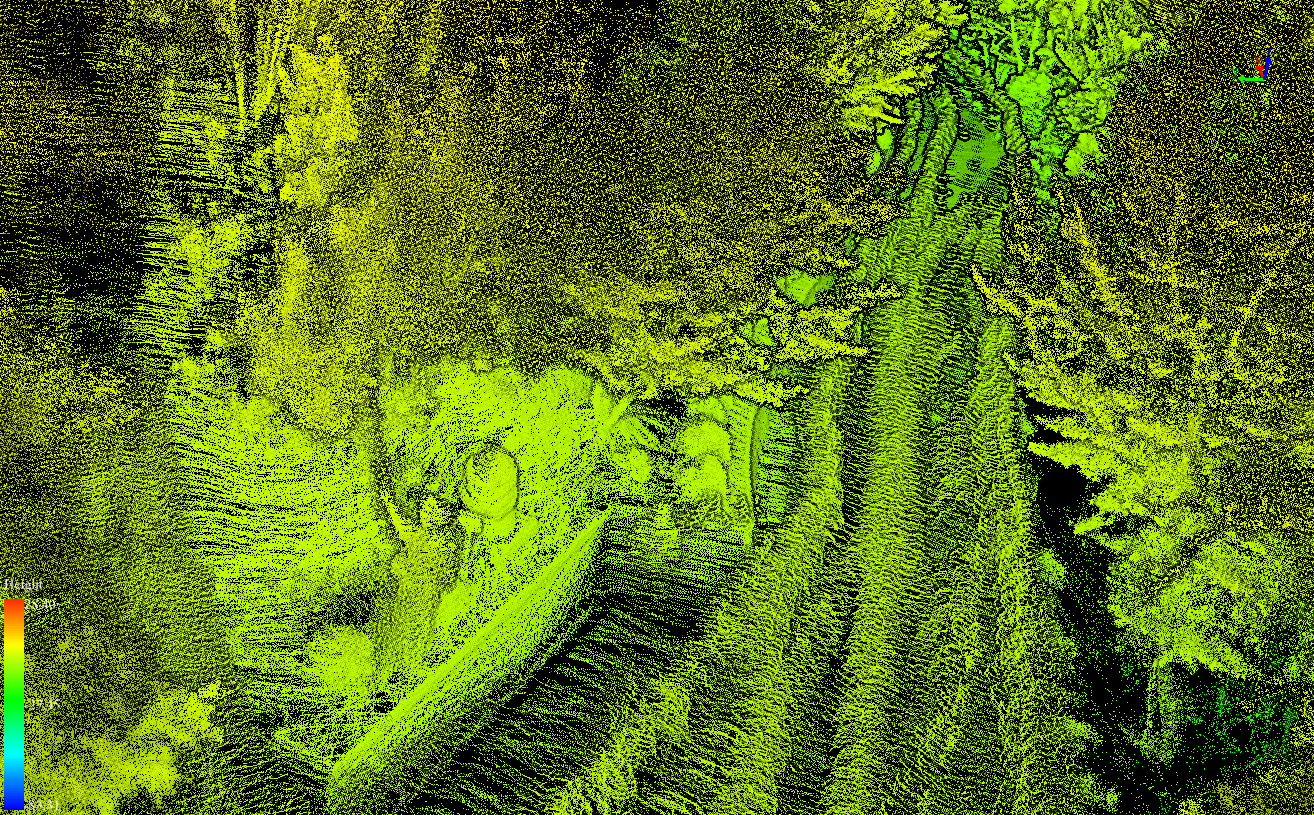
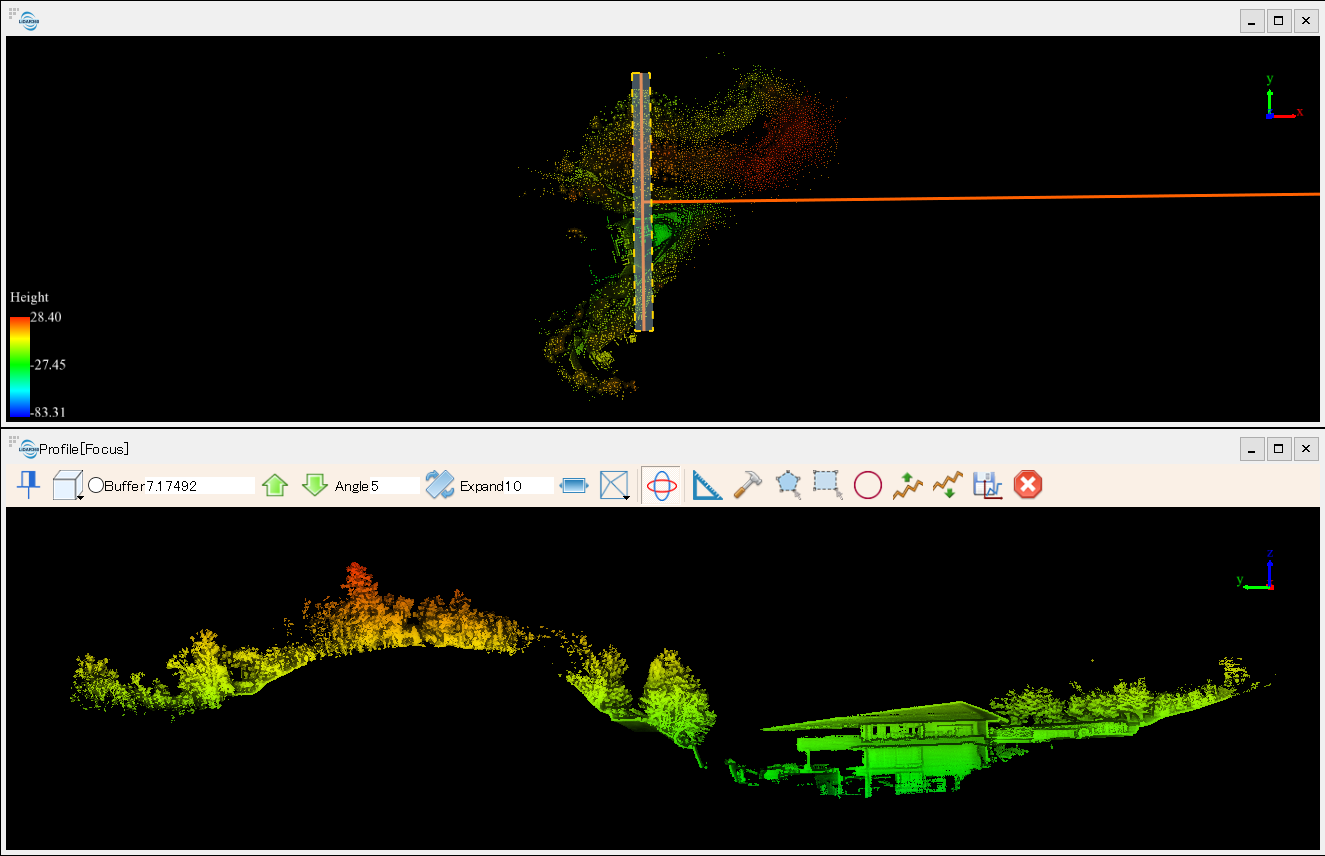
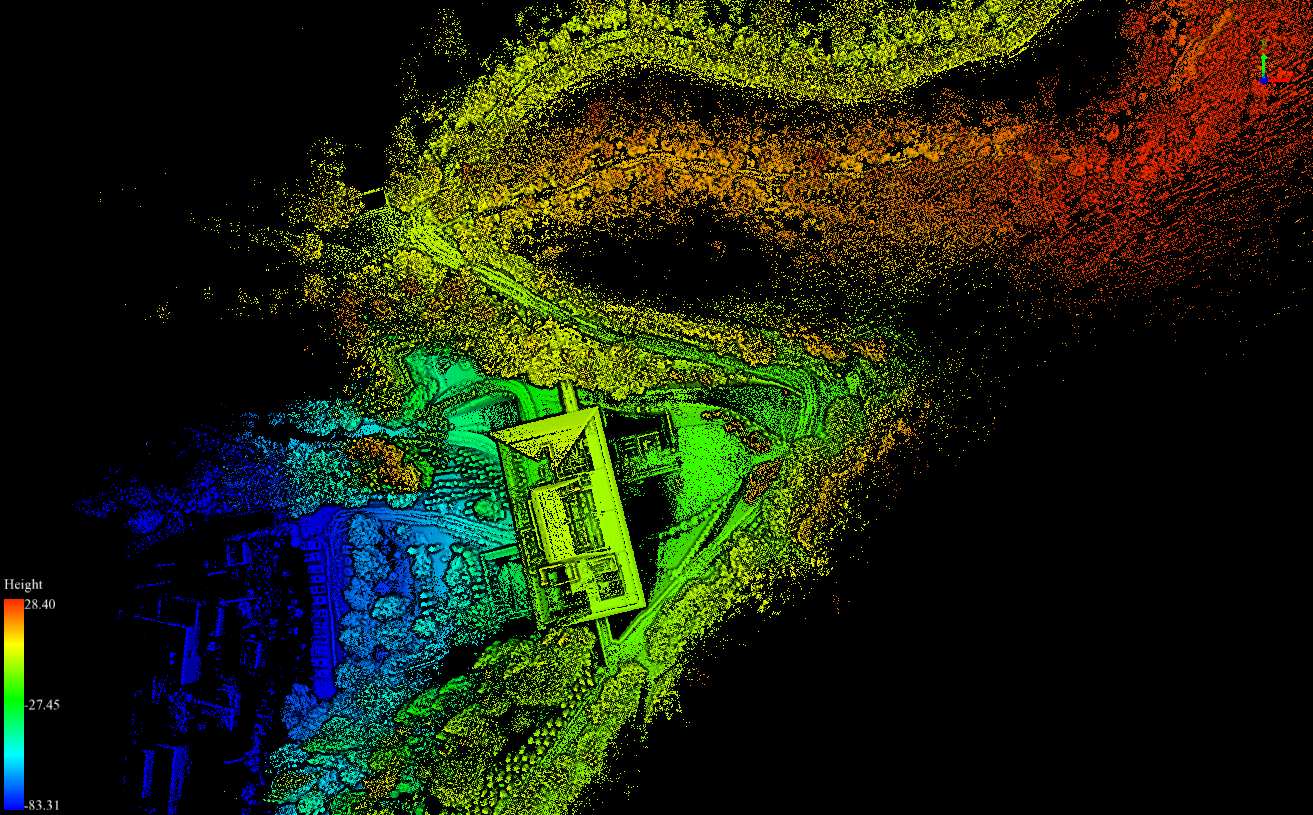
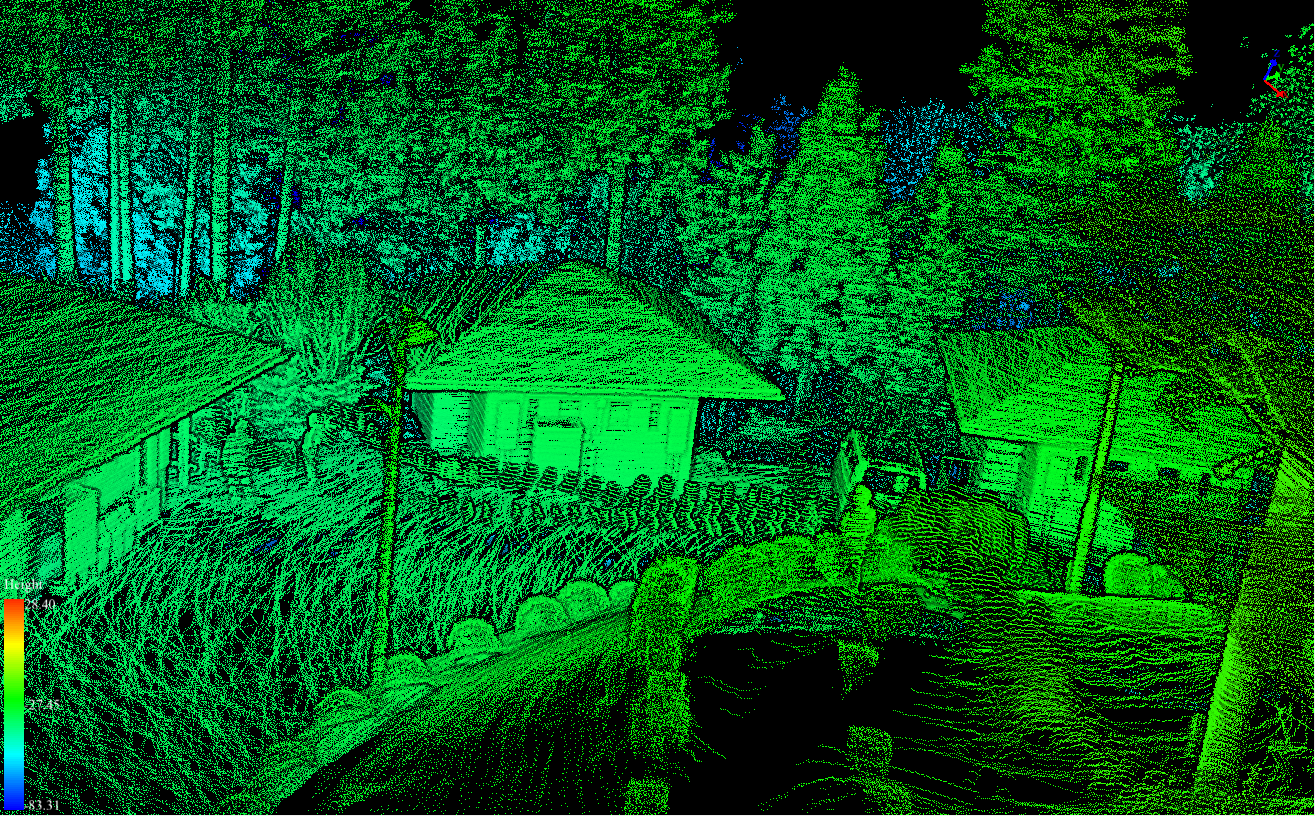
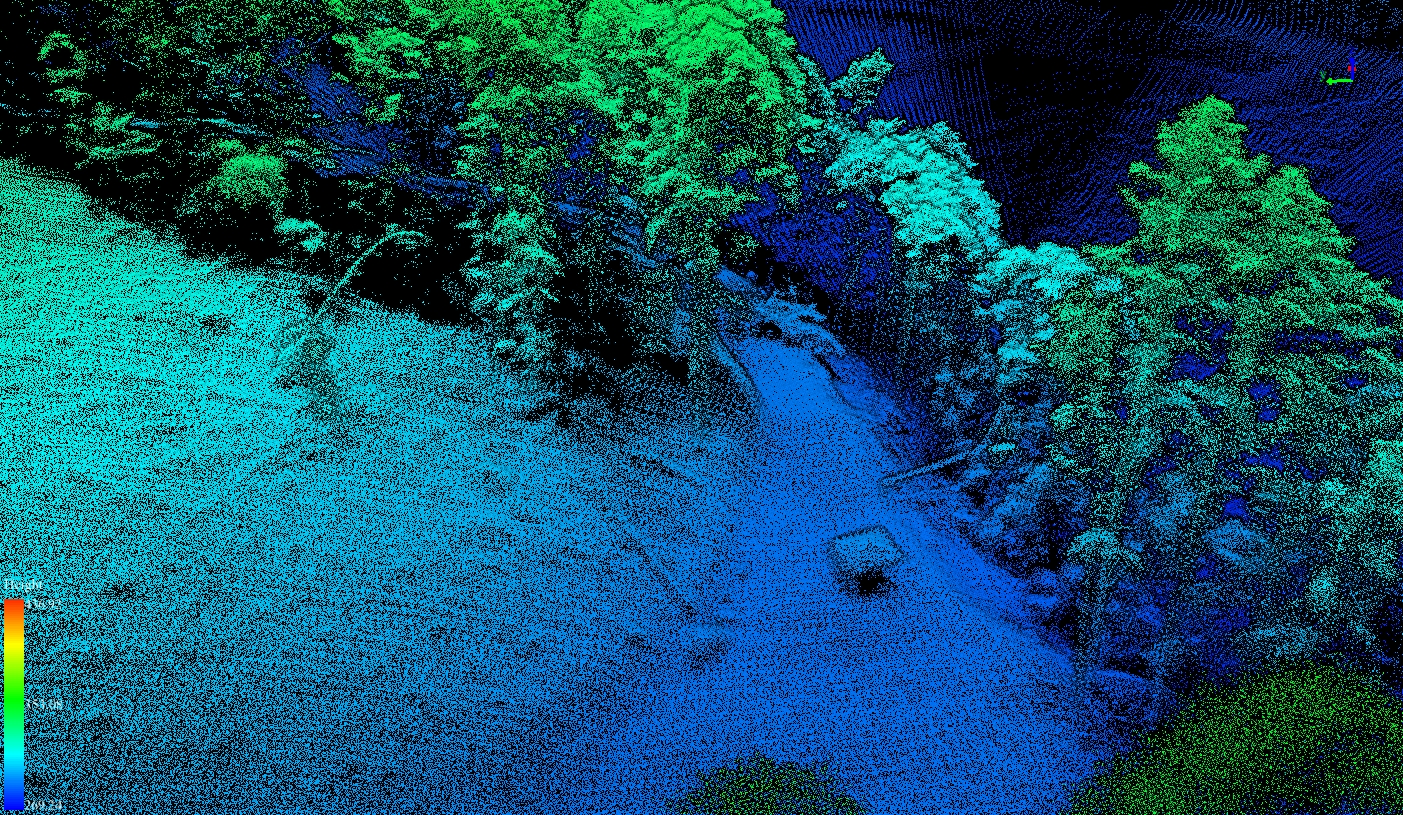
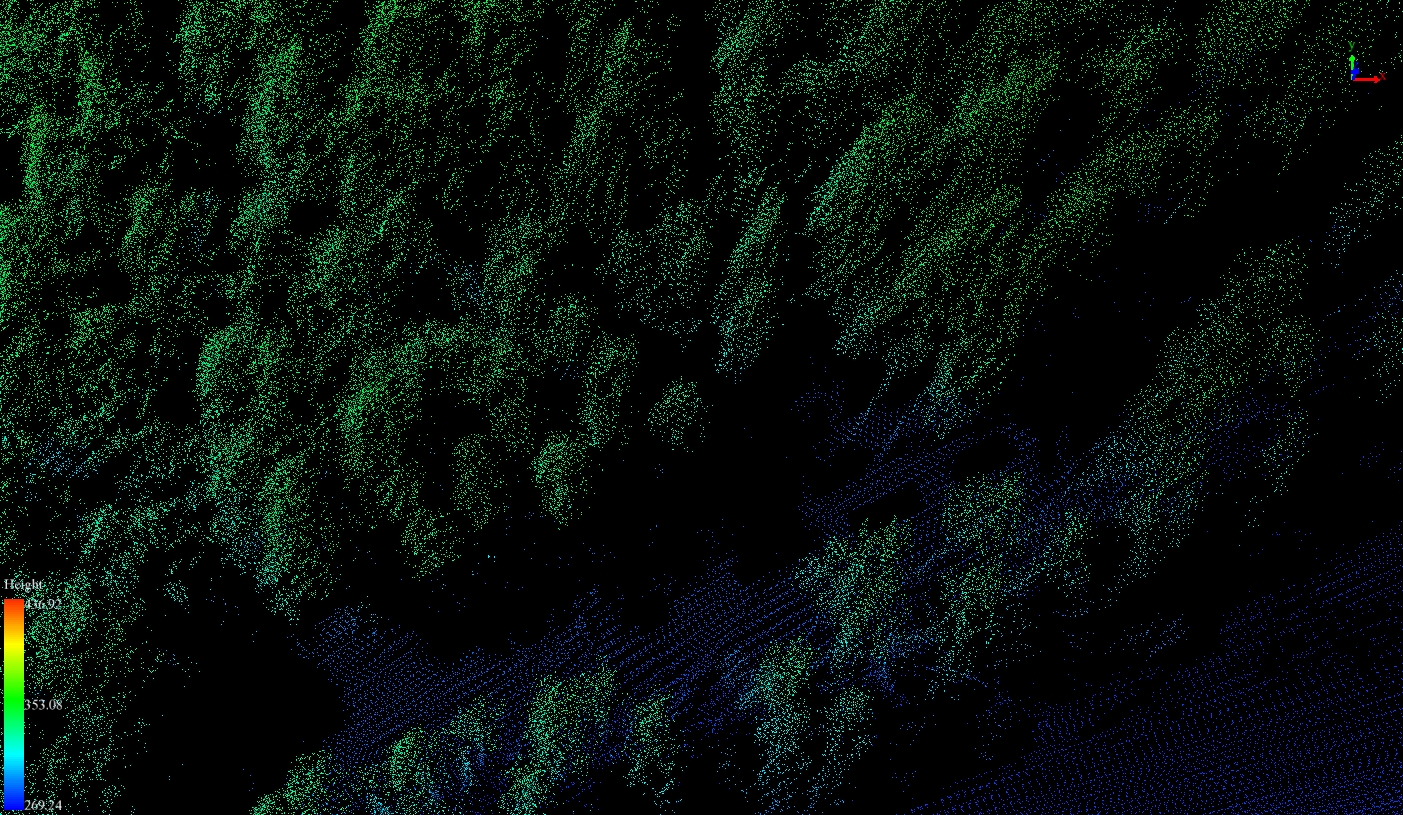
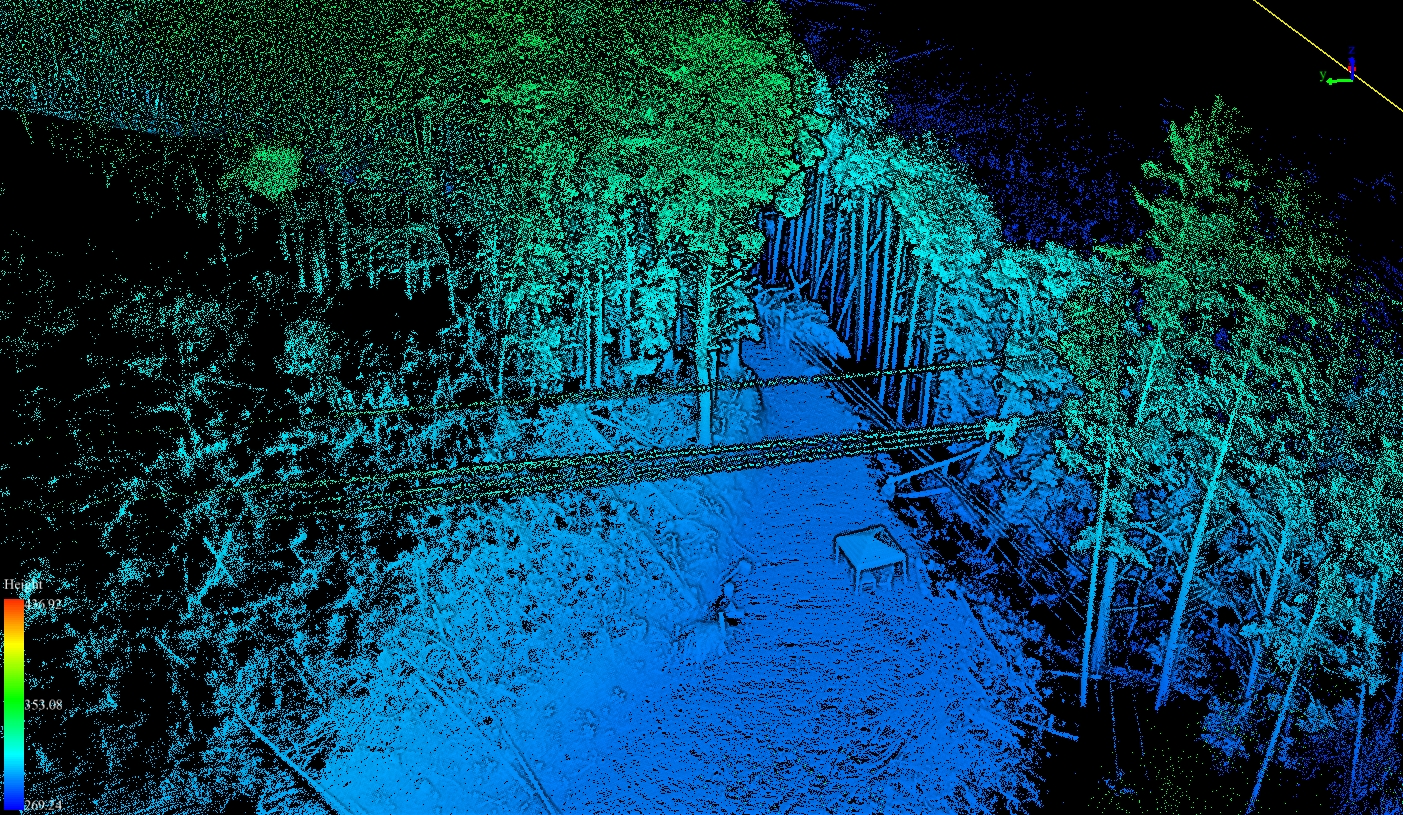
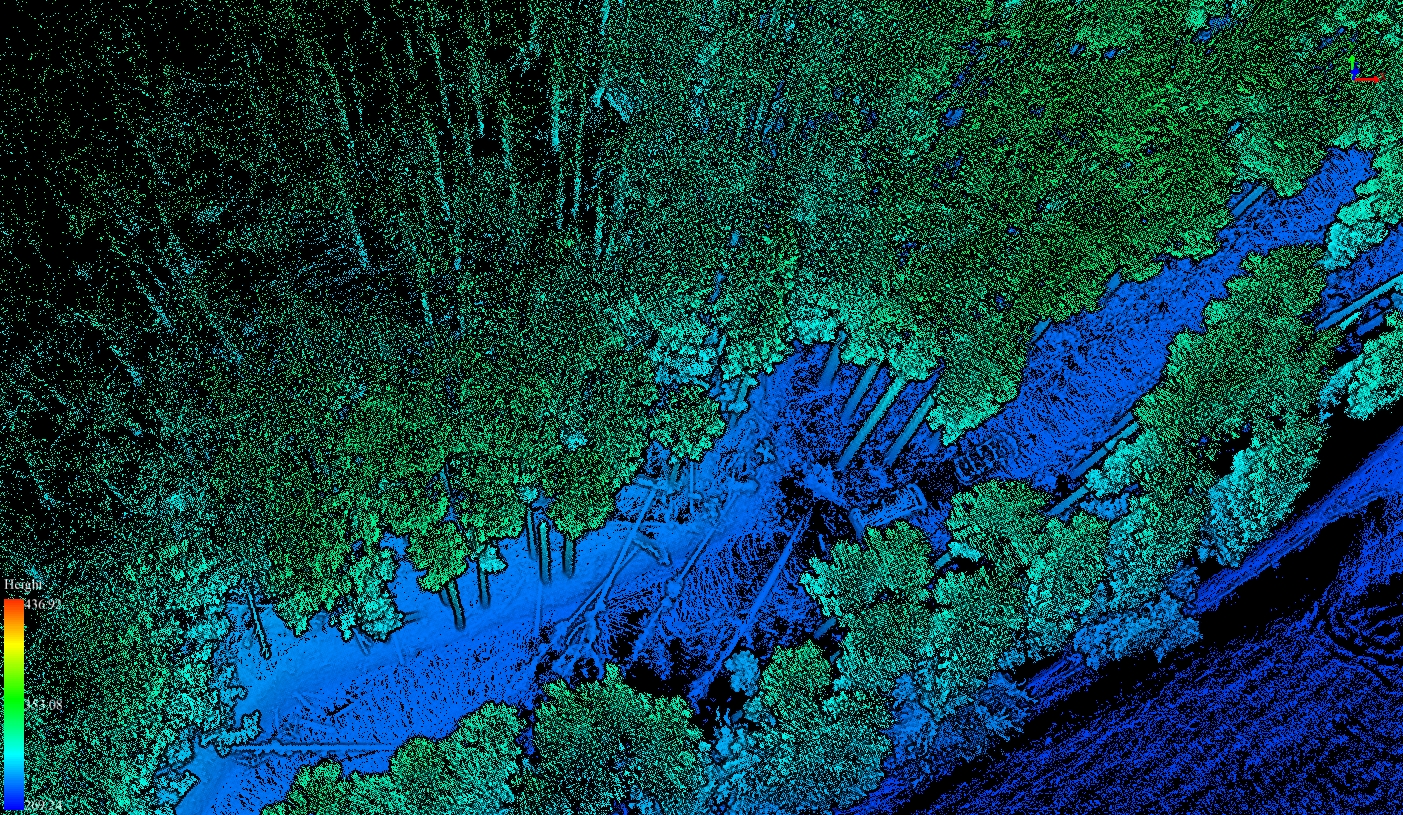
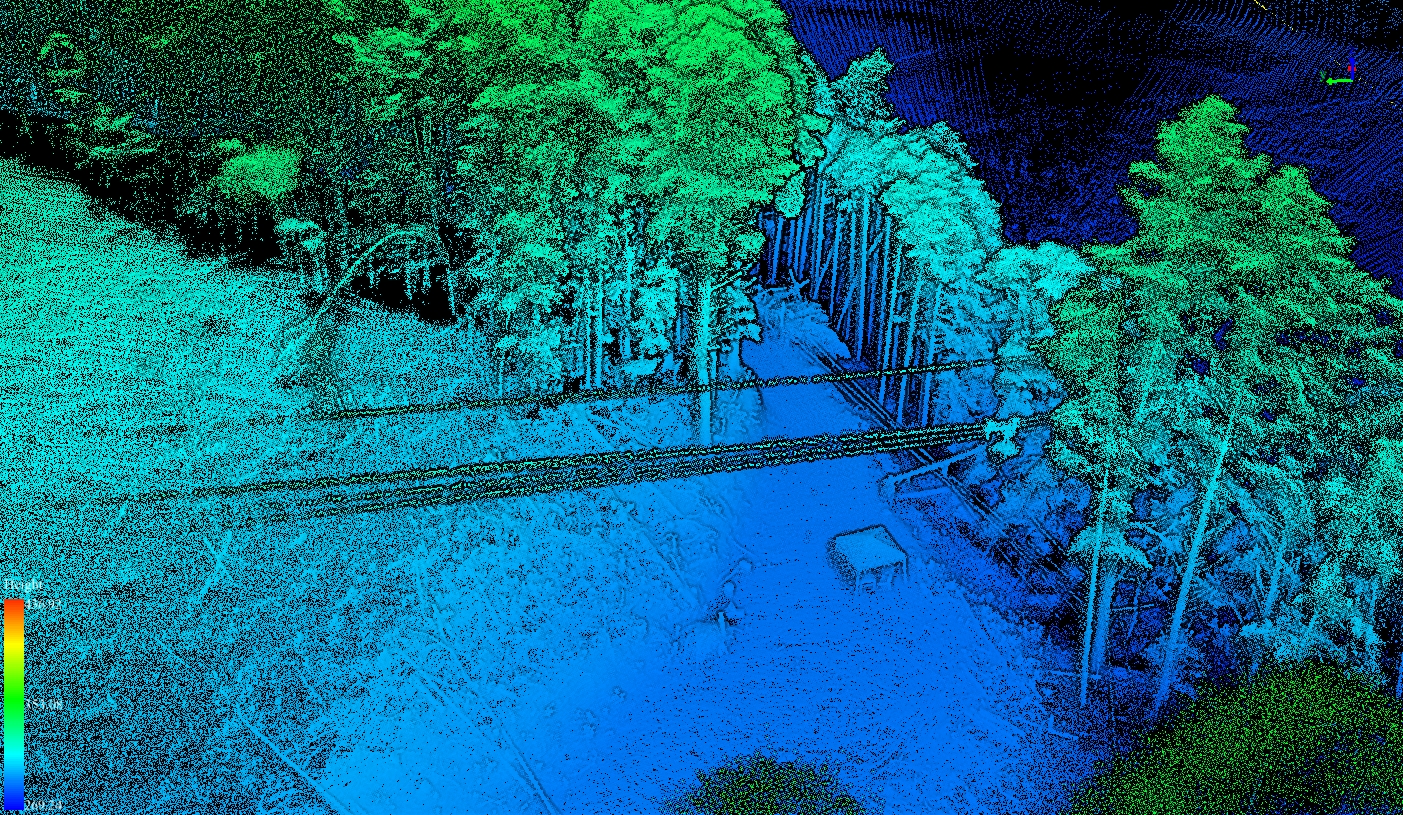
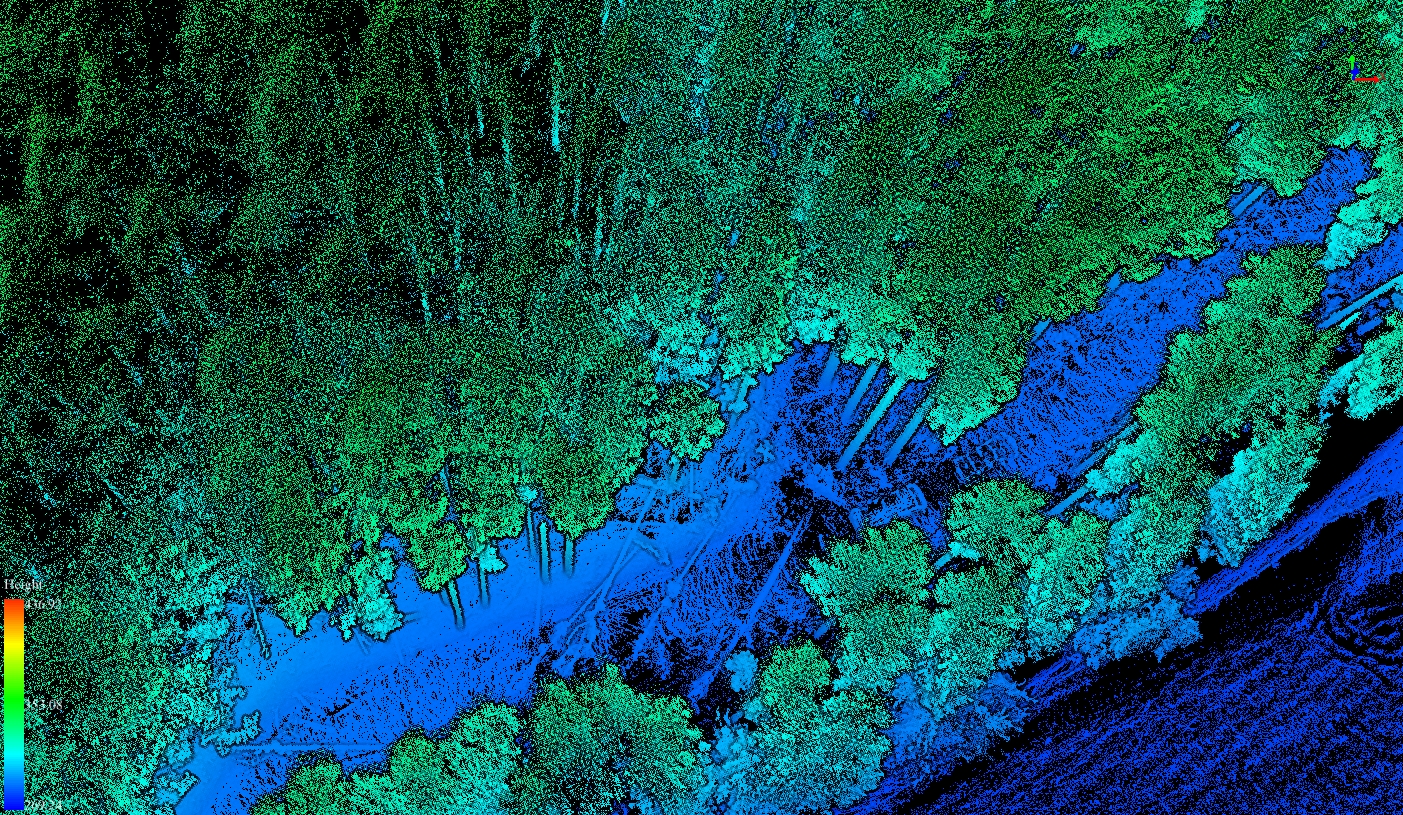
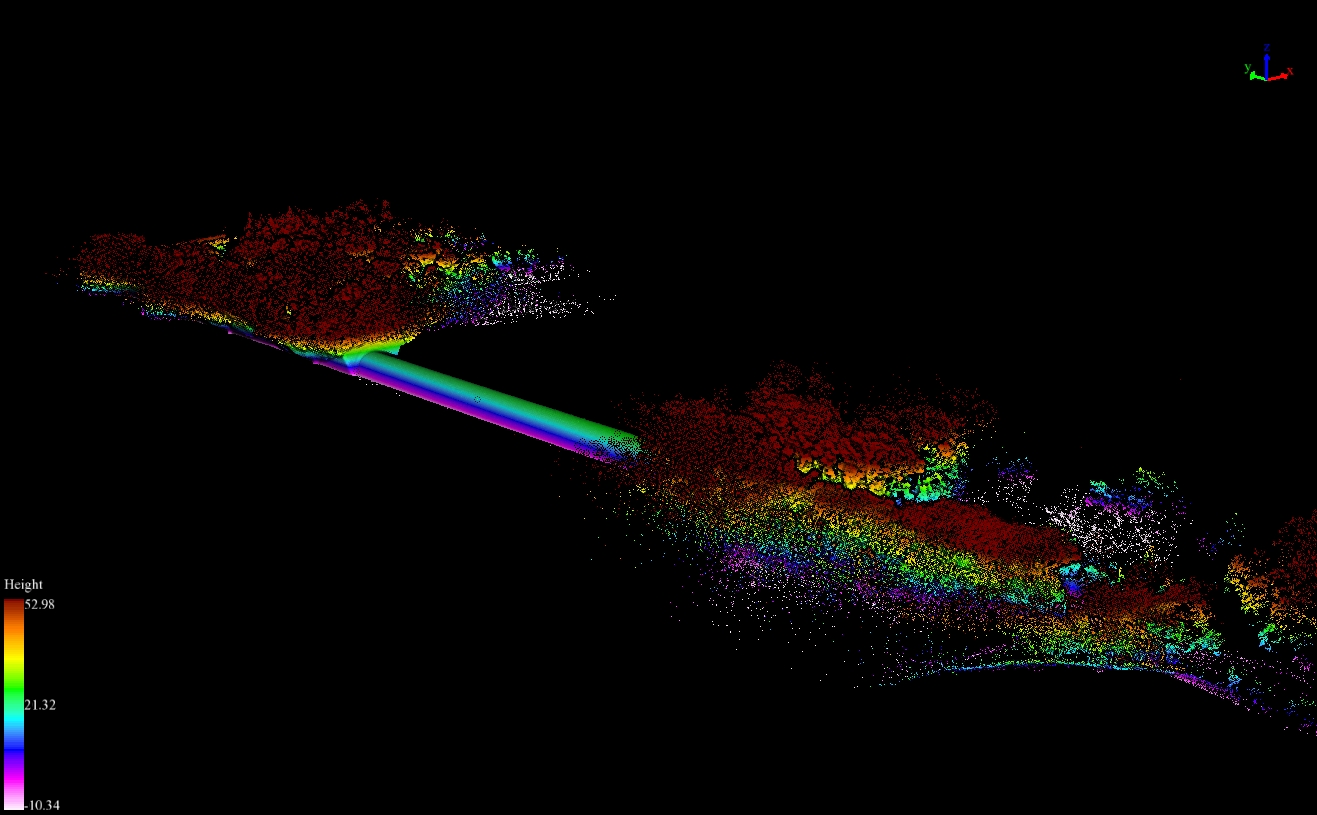
デモ10:レーザードローン+デュアルセンサー搭載バックパック型LiDARによる森林計測
| 場所 | 京都市右京区京北赤石町 / 森林計測 |
|---|---|
| 実施日 | 2018年9月26日(水) |
| 使用ツール | レーザードローン / Liair バックパック型LiDAR / Libackpack D50(デュアルタイプ)(旧モデル) |
| 天候 | 晴れ |
| 詳細 | 上空からレーザードローン、地上からバックパック型LiDAR(デュアルタイプ)を併用して森林の3次元データを結合しました。(国内初) |
| 参考 | Optinewsの紹介記事 |
デモ動画

デモ画像
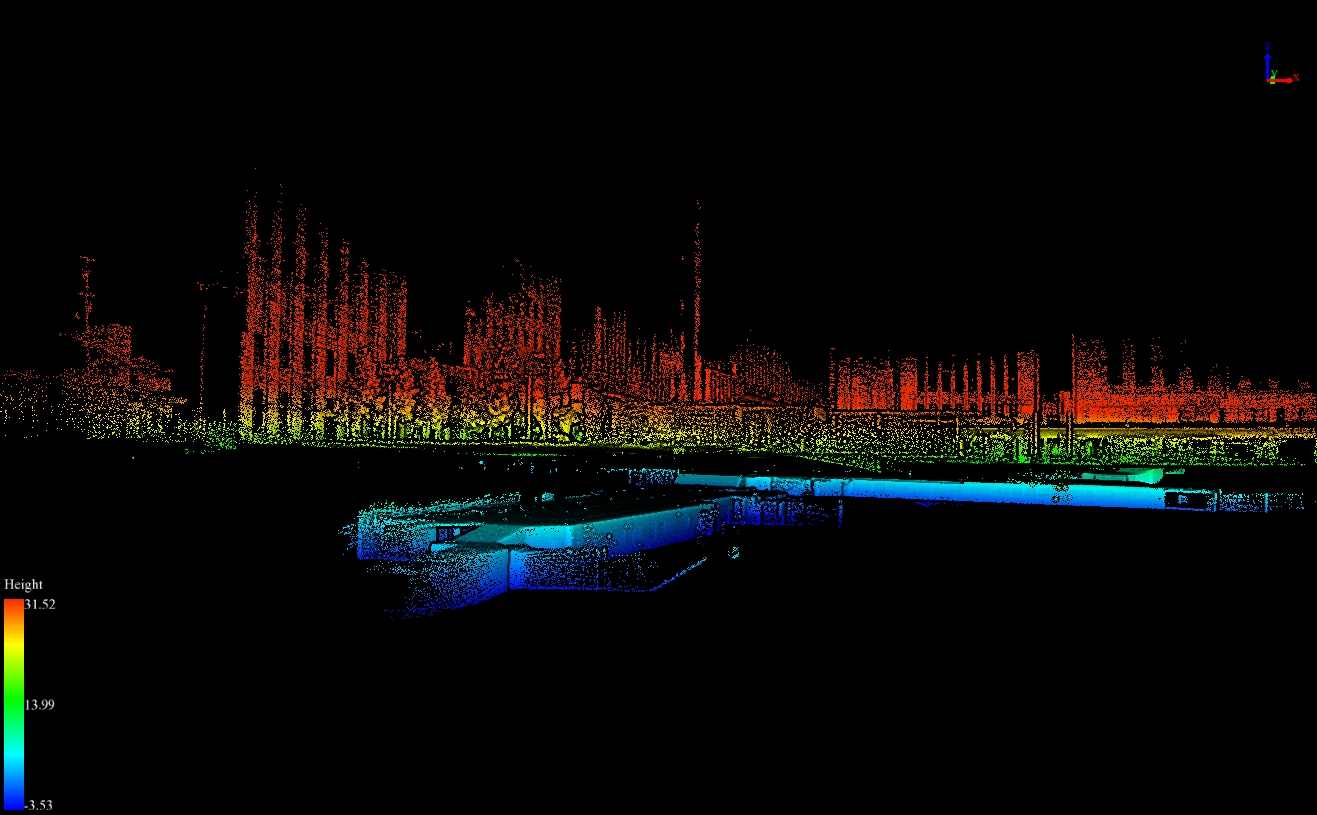
デモ11:地下鉄四条駅(光響周辺)の様子
| 場所 | 京都市下京区 / 四条烏丸交差点 |
|---|---|
| 実施日 | 2019年9月28日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack D50(デュアルタイプ)(旧モデル) |
| 天候 | 晴れ |
| 詳細 | |
| 参考 | – |
デモ動画

デモ画像

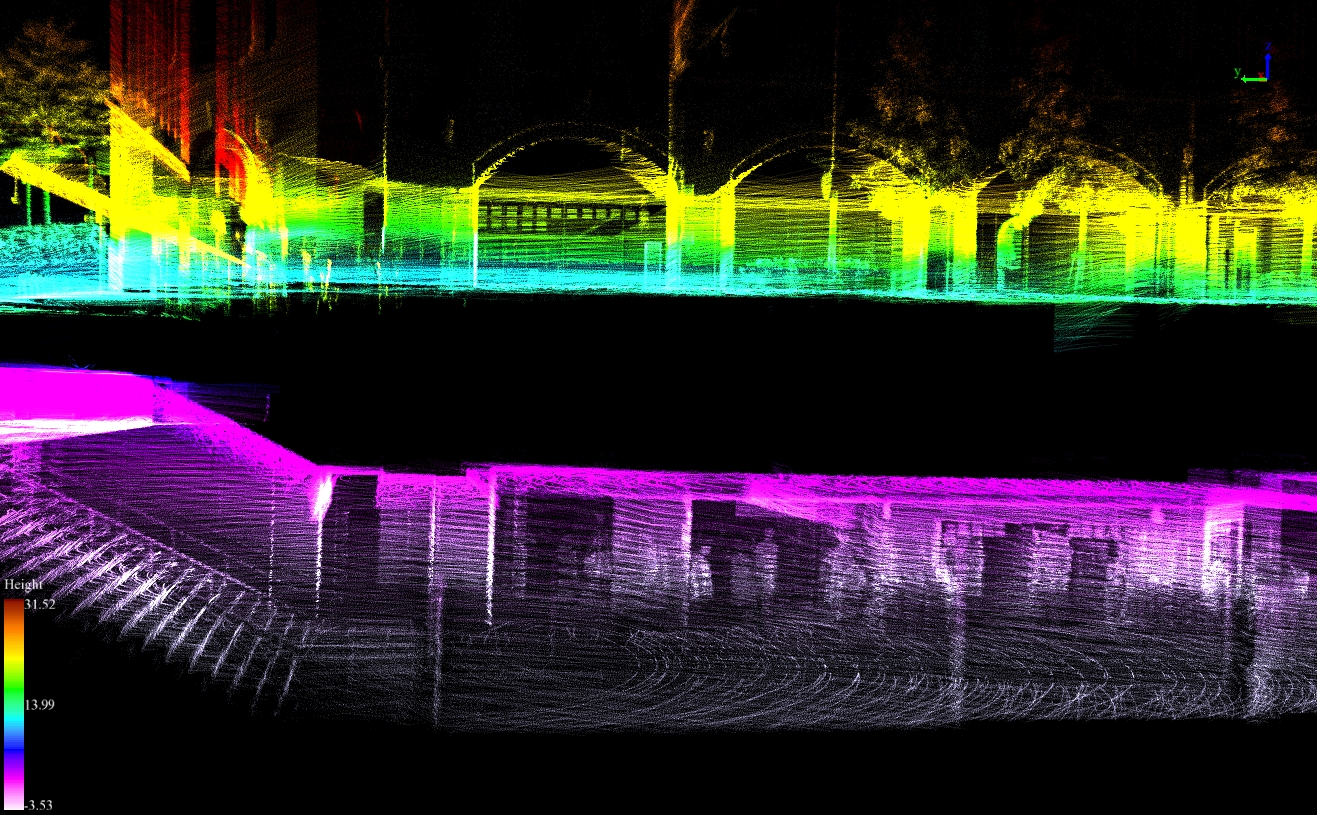
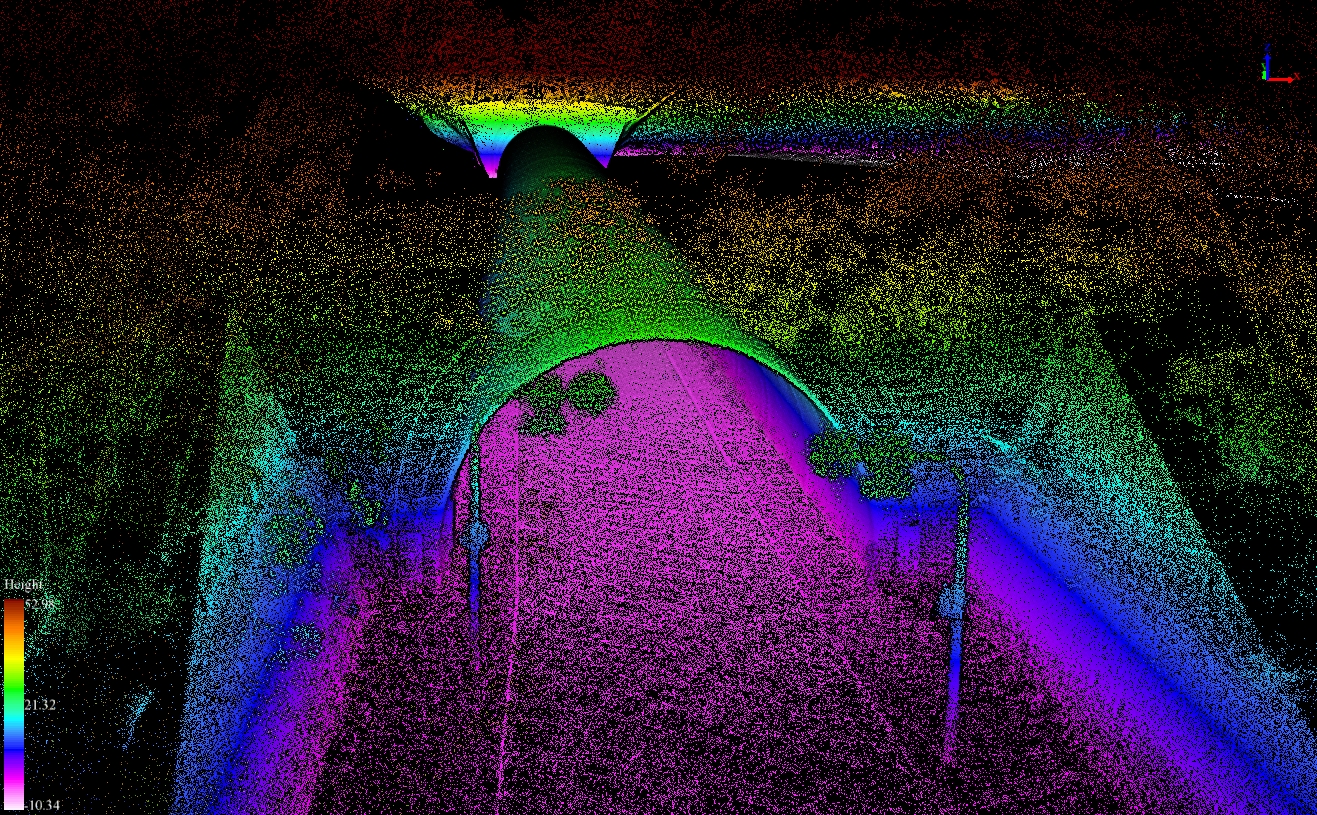
デモ12:京都市内 / 宝ヶ池トンネルの様子
| 場所 | 京都市左京区 / 宝ヶ池トンネル |
|---|---|
| 実施日 | 2019年9月28日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack D50(デュアルタイプ)(旧モデル) |
| 天候 | 晴れ |
| 詳細 | |
| 参考 | – |
デモ動画

デモ画像
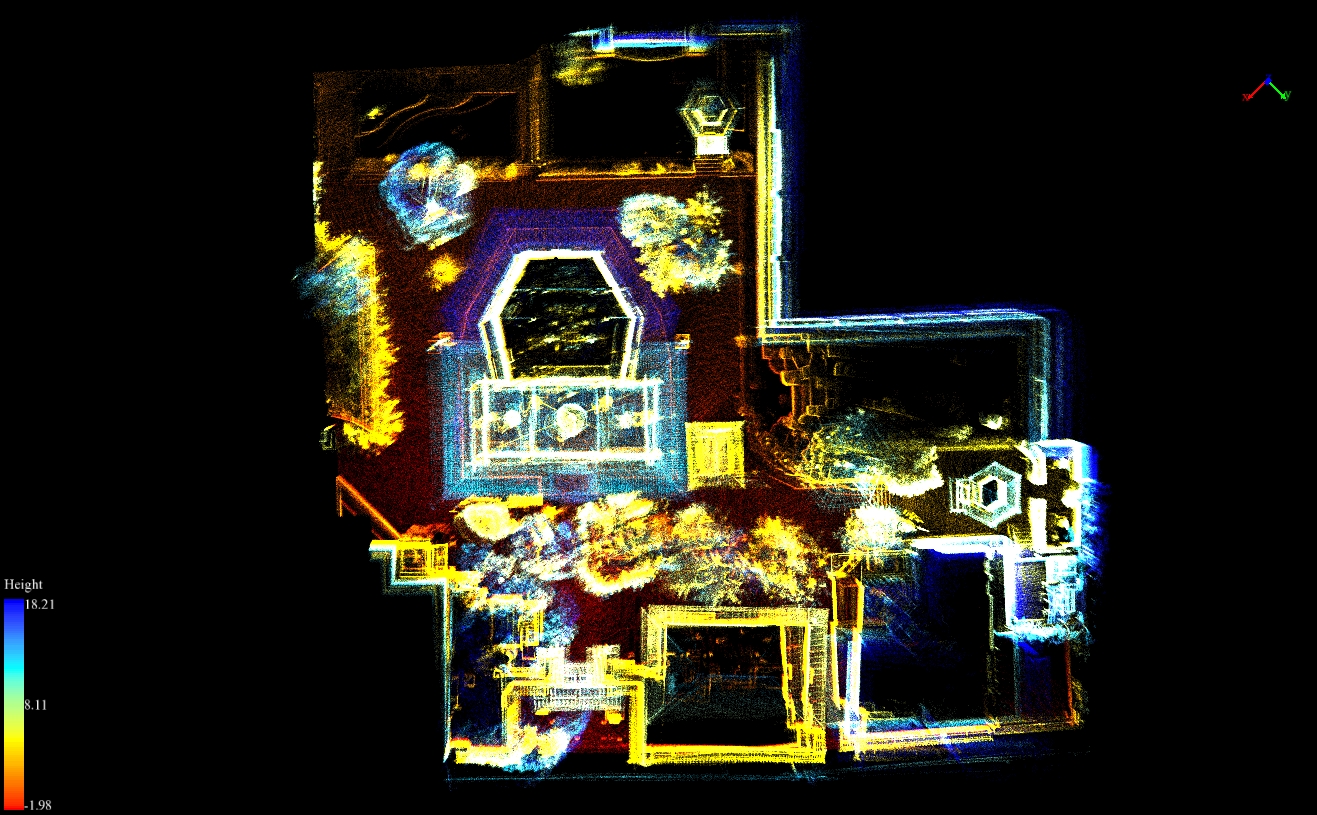
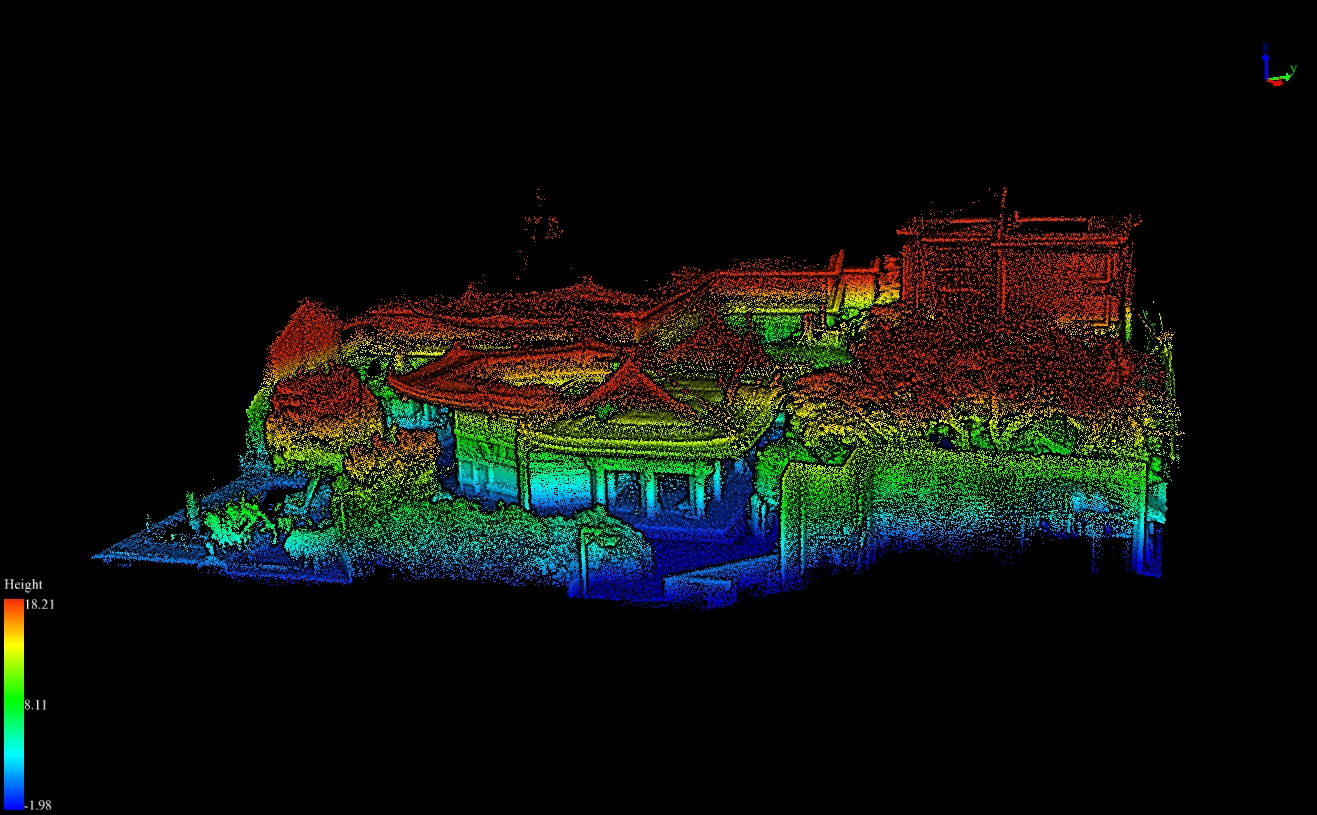
デモ13:京都市内 / 六角堂の様子
| 場所 | 京都市中京区 / 紫雲山頂法寺(通称:六角堂) |
|---|---|
| 実施日 | 2019年9月28日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack D50(デュアルタイプ)(旧モデル) |
| 天候 | 晴れ |
| 詳細 | |
| 参考 | – |
デモ動画
デモ画像
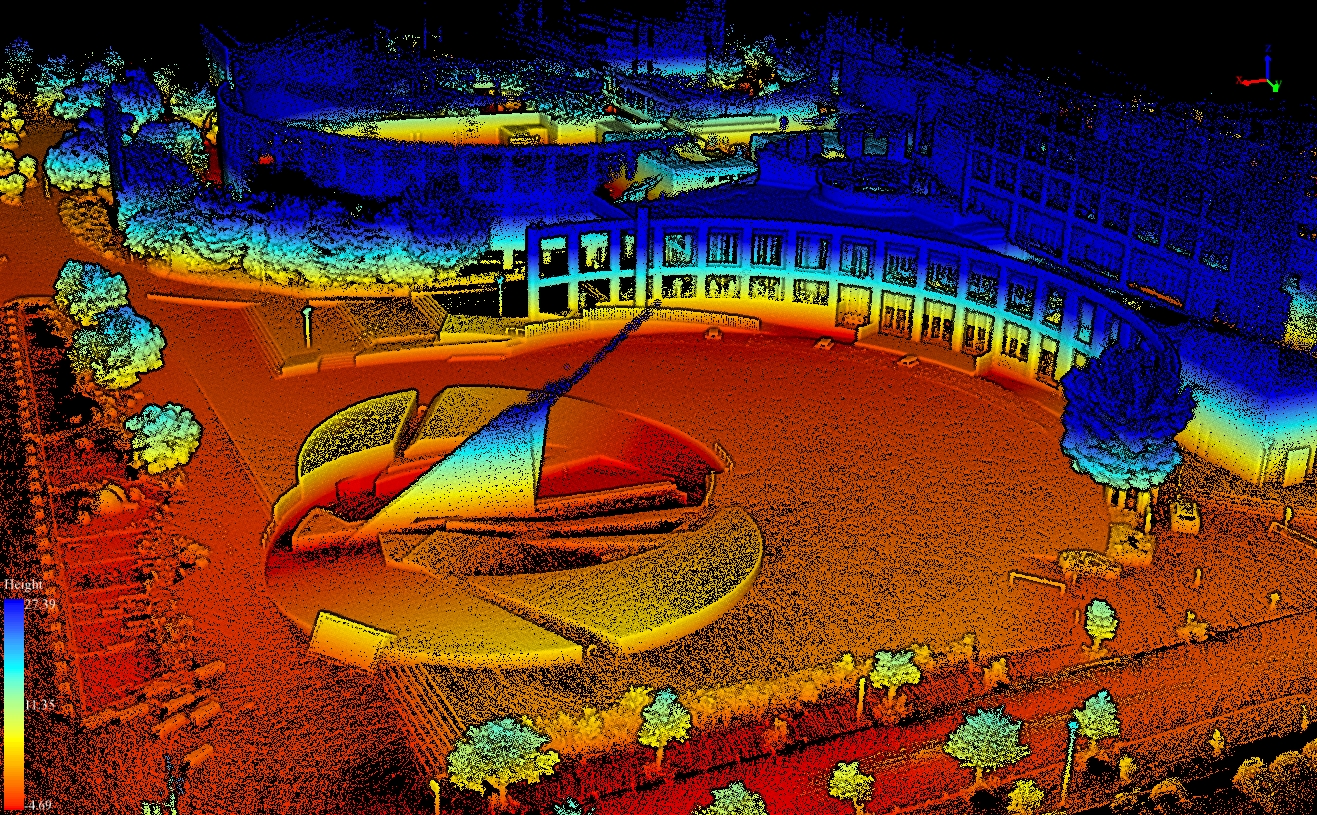
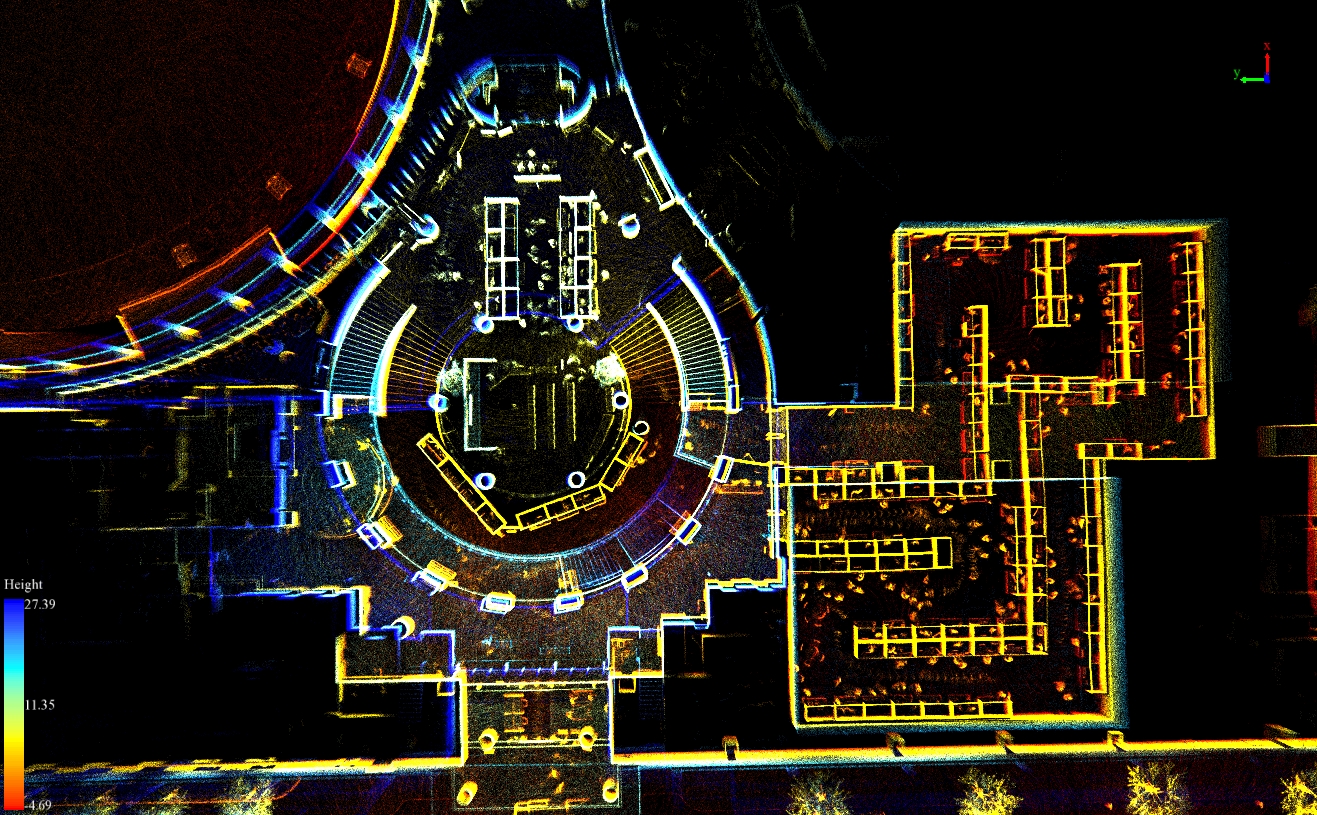
デモ14:けいはんなビジネスメッセ / けいはんなプラザの様子
| 場所 | 京都府相楽郡精華町 / けいはんなビジネスメッセ |
|---|---|
| 実施日 | 2019年10月4日(木) |
| 使用ツール | バックパック型LiDAR / Libackpack D50(デュアルタイプ)(旧モデル) |
| 天候 | 晴れ |
| 詳細 | |
| 参考 | – |
デモ動画
デモ画像

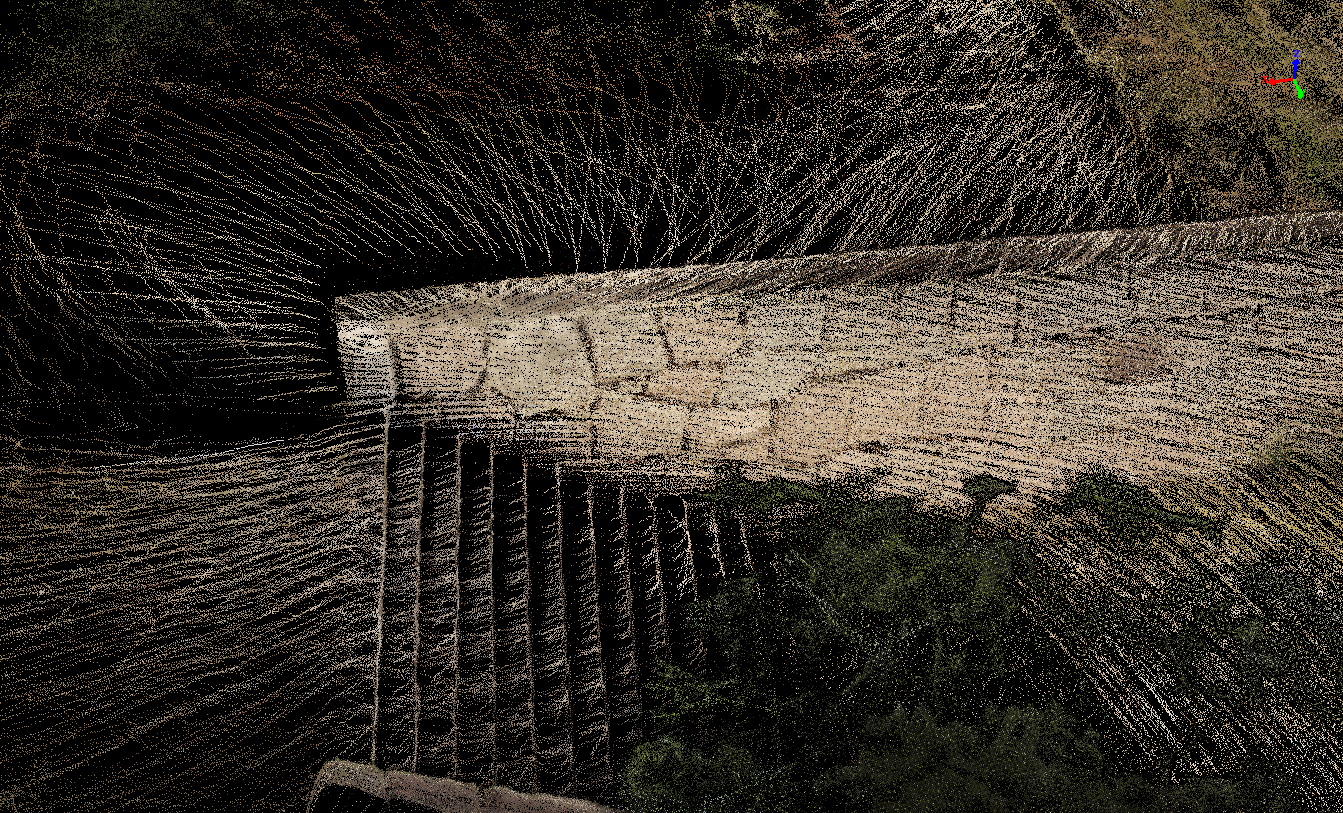
デモ15:京都府宇治市 / 天ヶ瀬ダムの様子
| 場所 | 京都府宇治市 / 天ヶ瀬ダム |
|---|---|
| 実施日 | 2019年4月22日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack DG50(旧製品) |
| 天候 | 晴れ |
| 詳細 | GPS機能搭載 |
| 参考 | Greenvalleyのページ |
デモ動画

デモ画像
デモ16:京都市内 / 八坂神社の様子
| 場所 | 京都市東山区 / 八坂神社 |
|---|---|
| 実施日 | 2019年5月17日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack C50 |
| 天候 | 晴れ |
| 詳細 | 360°のカメラ付きで、RGBカラー点群データを取得できます。 |
| 参考 | Greenvalleyのページ |
デモ動画

デモ画像

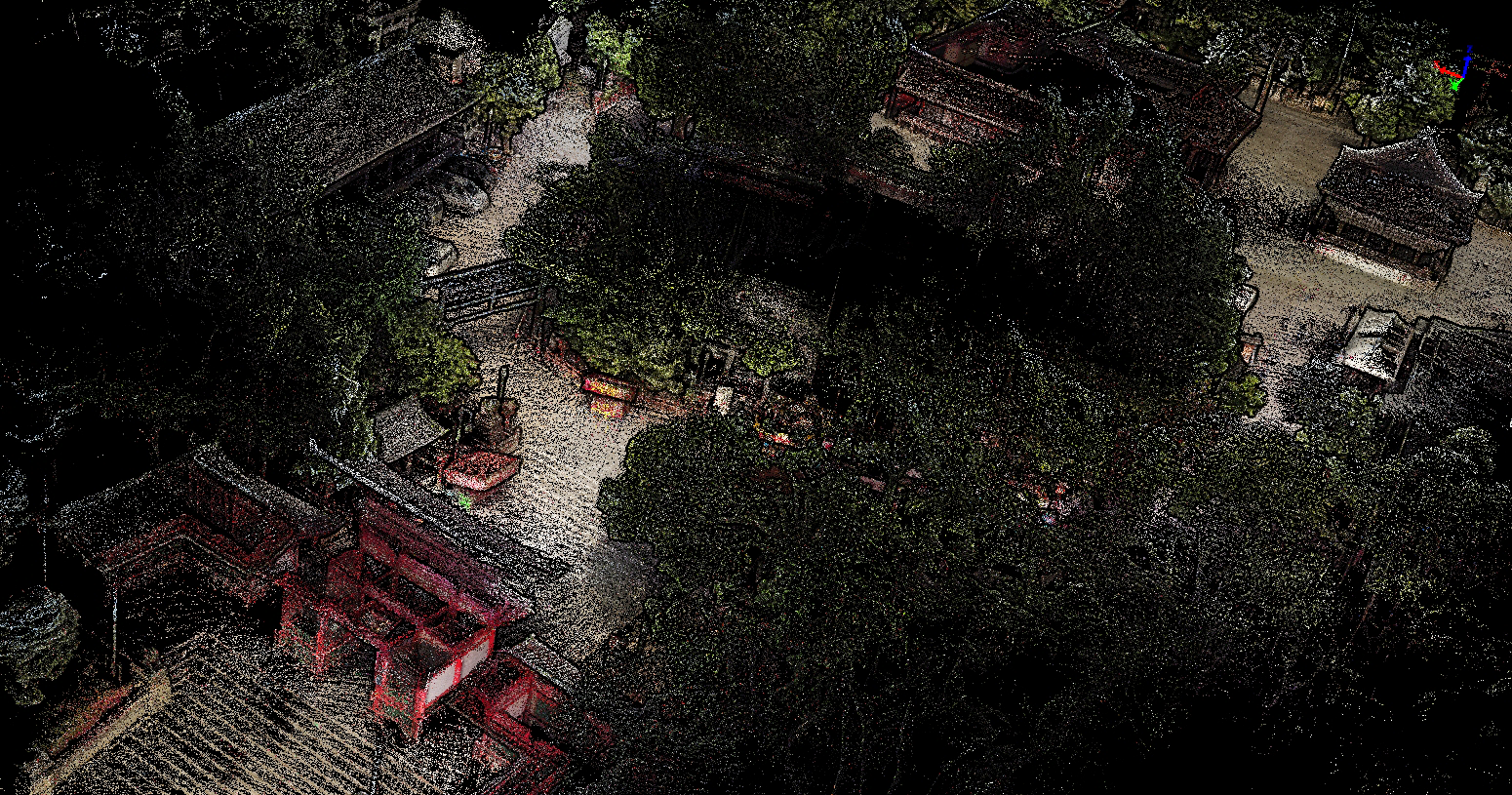
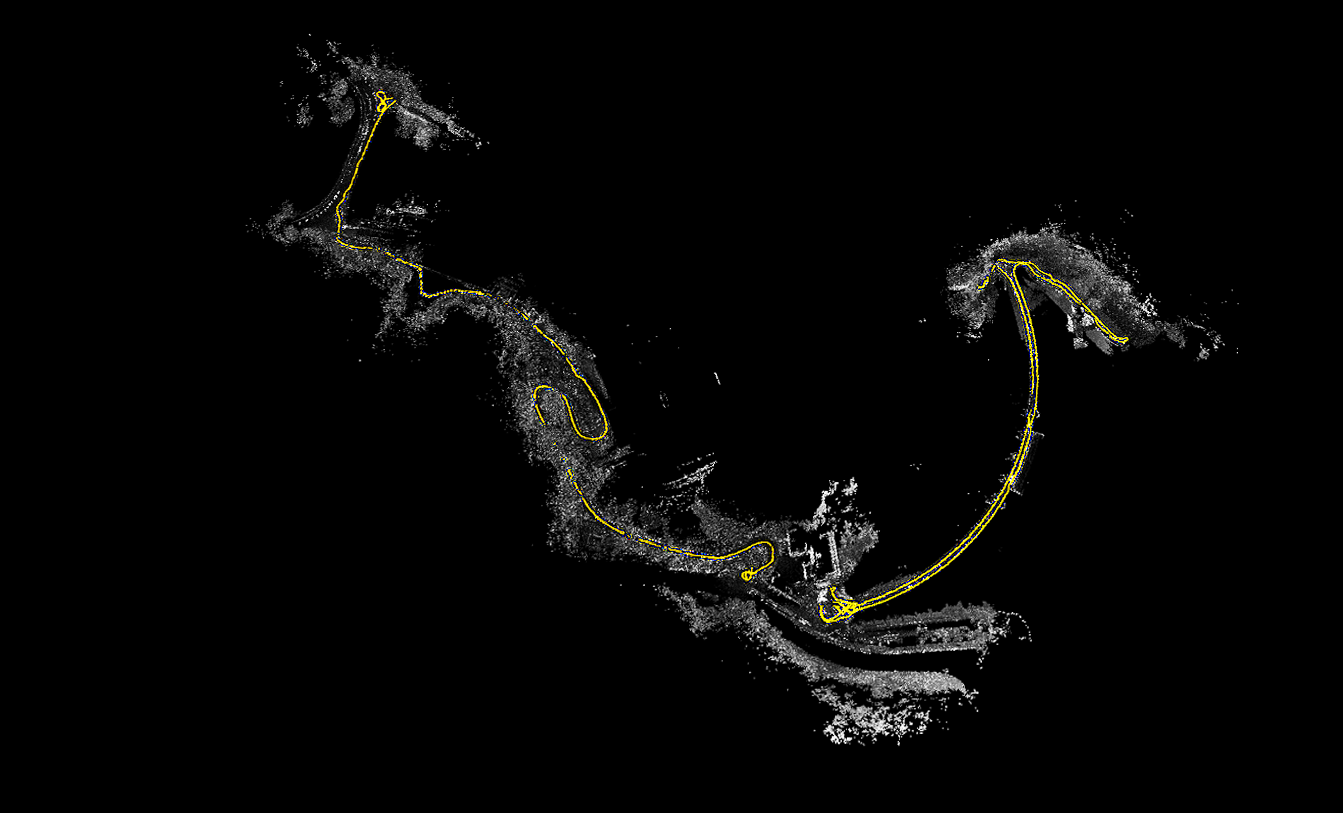
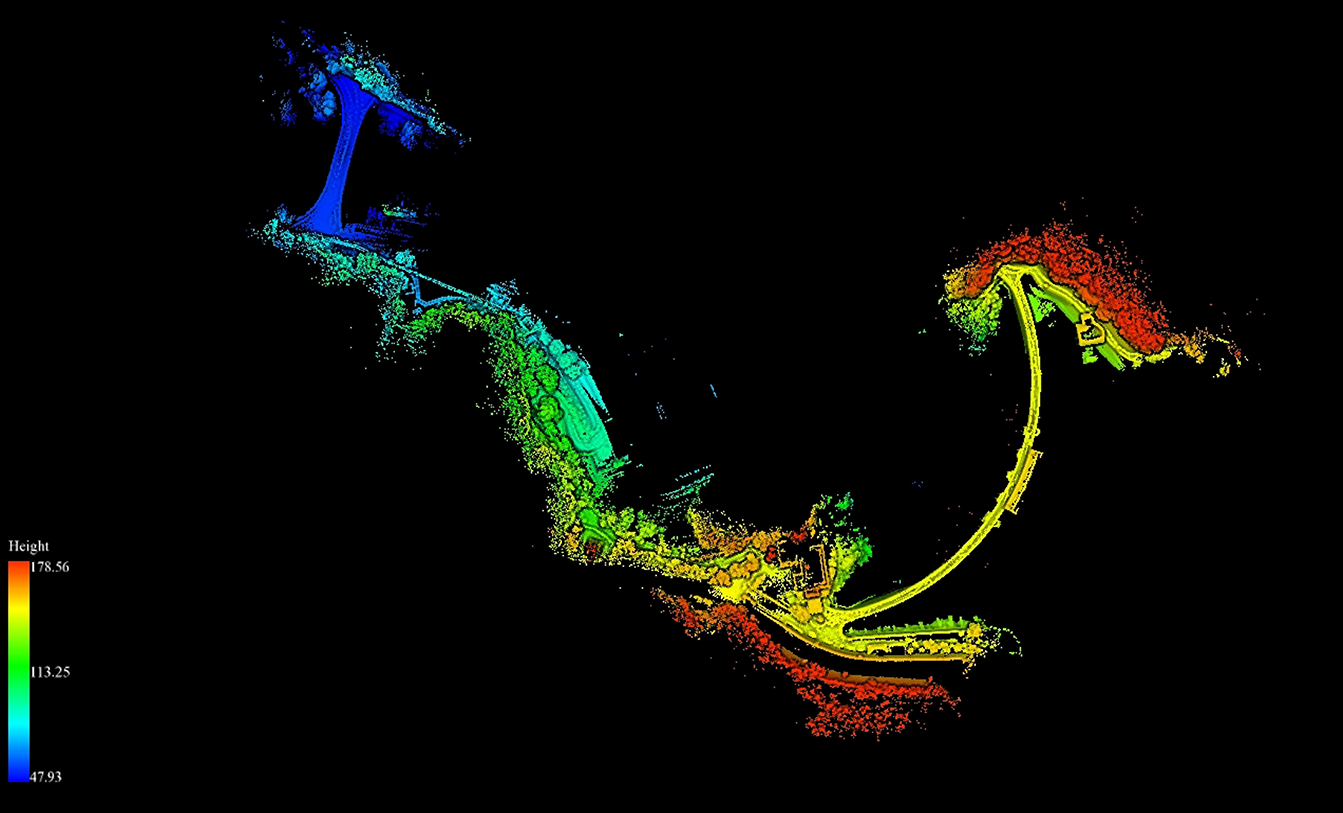
デモ17:京都市内 / 伏見稲荷大社の様子
| 場所 | 京都市伏見区 / 伏見稲荷大社 |
|---|---|
| 実施日 | 2019年5月17日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack C50 |
| 天候 | 晴れ |
| 詳細 | 360°のカメラ付きで、RGBカラー点群データを取得できます。 |
| 参考 | Greenvalleyのページ |
デモ動画


デモ画像



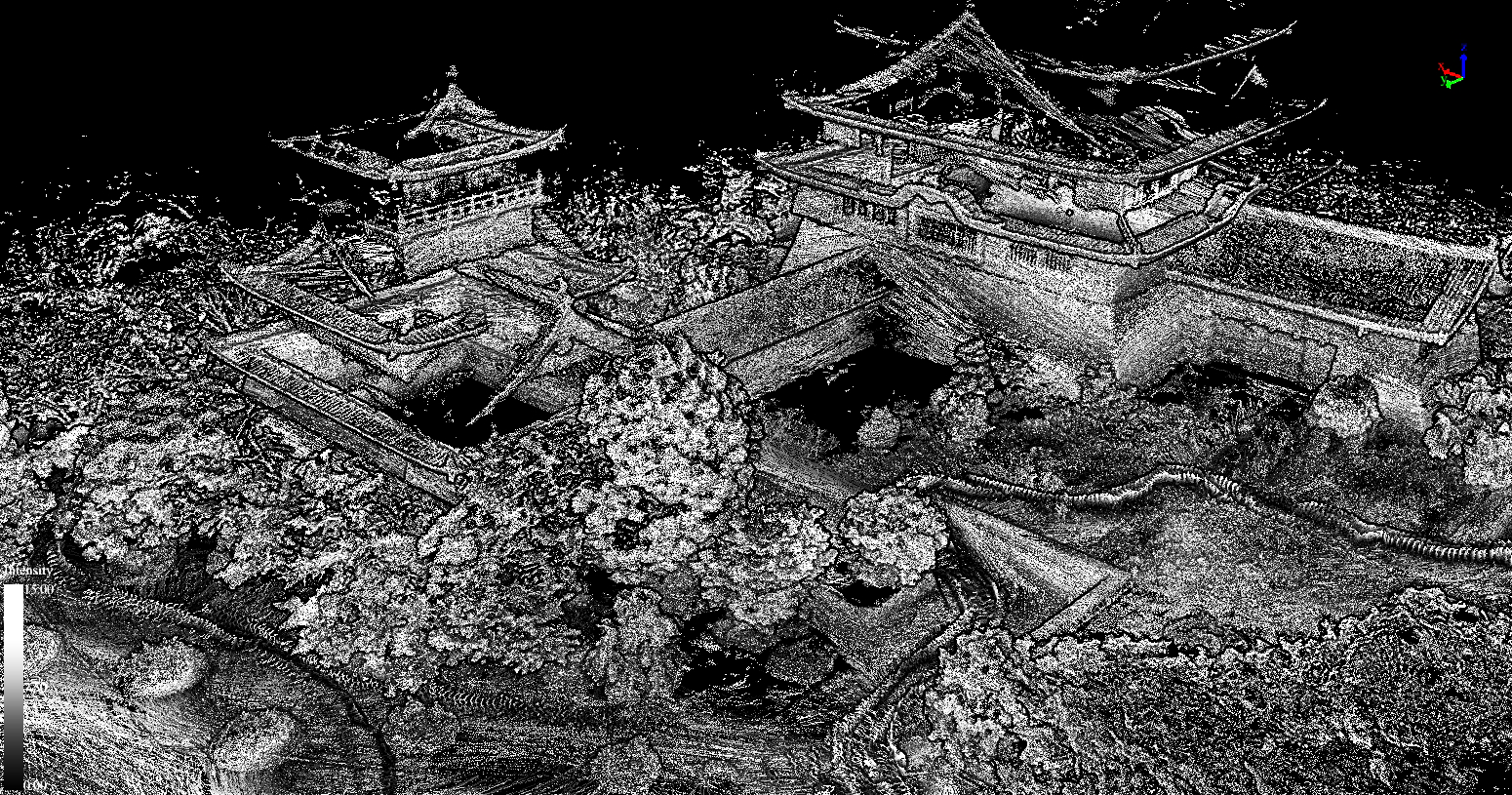
デモ18:京都市内 / 伏見桃山城の様子
| 場所 | 京都市内 / 伏見桃山城 |
|---|---|
| 実施日 | 2019年5月17日(金) |
| 使用ツール | バックパック型LiDAR / Libackpack C50 |
| 天候 | 晴れ |
| 詳細 | 360°のカメラ付きで、RGBカラー点群データを取得できます。 |
| 参考 | Greenvalleyのページ |
デモ動画

デモ画像


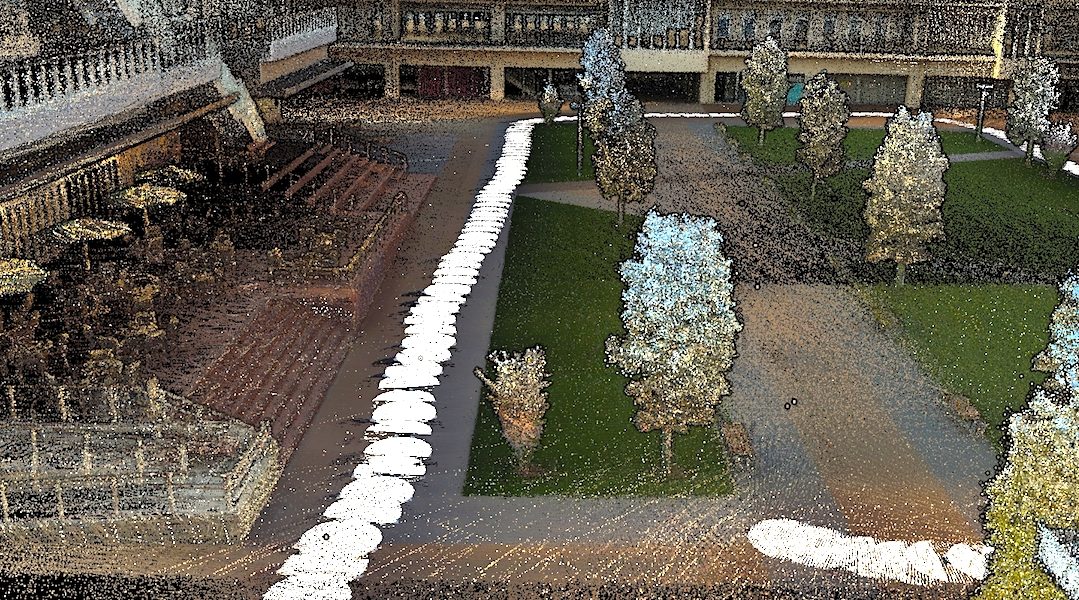
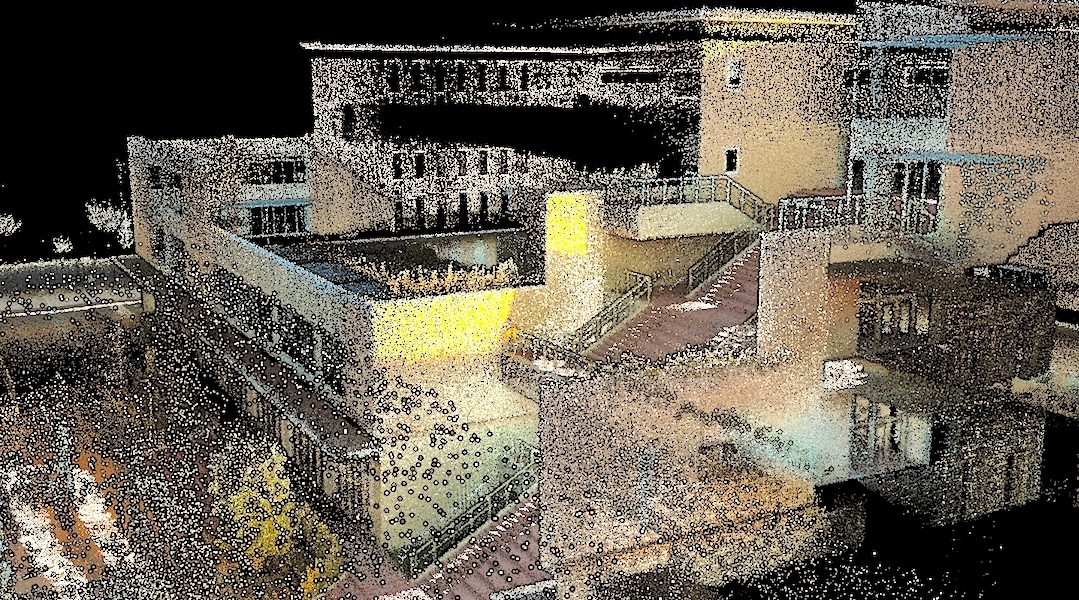
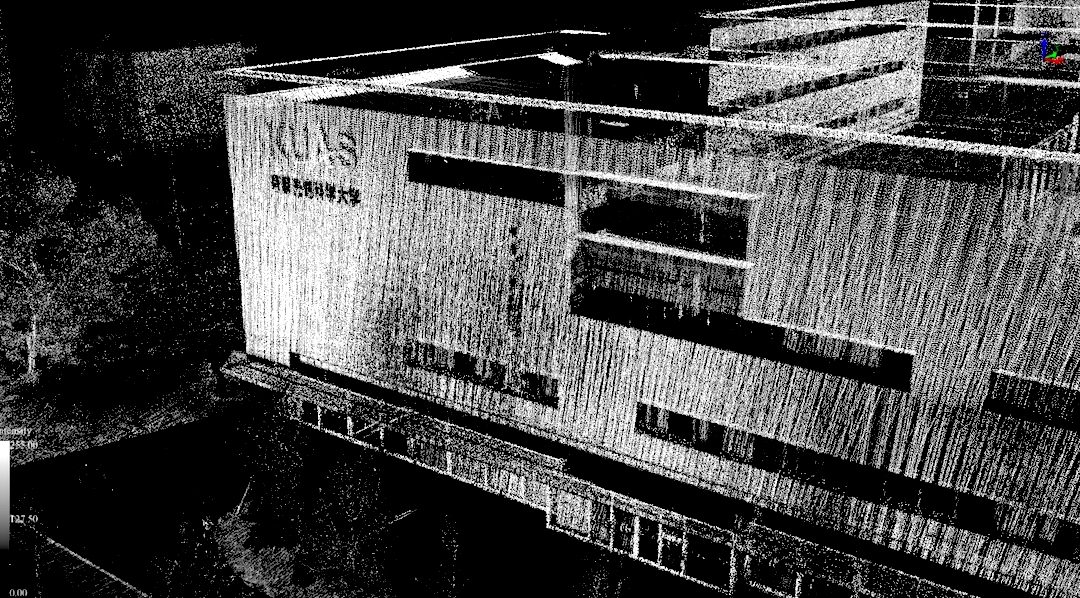
デモ19:京都市内 / 京都先端科学大学
| 場所 | 京都市右京区 / 京都先端科学大学 |
|---|---|
| 実施日 | 2020年3月24日(火) |
| 使用ツール | バックパック型LiDAR / Libackpack DGC50 |
| 天候 | 晴れ |
| 詳細 | GPS付き、デュアルセンサー型、360°カメラ付き、RGBカラー点群データを取得可能 |
| 参考 | Greenvalleyのページ |
デモ動画

デモ画像

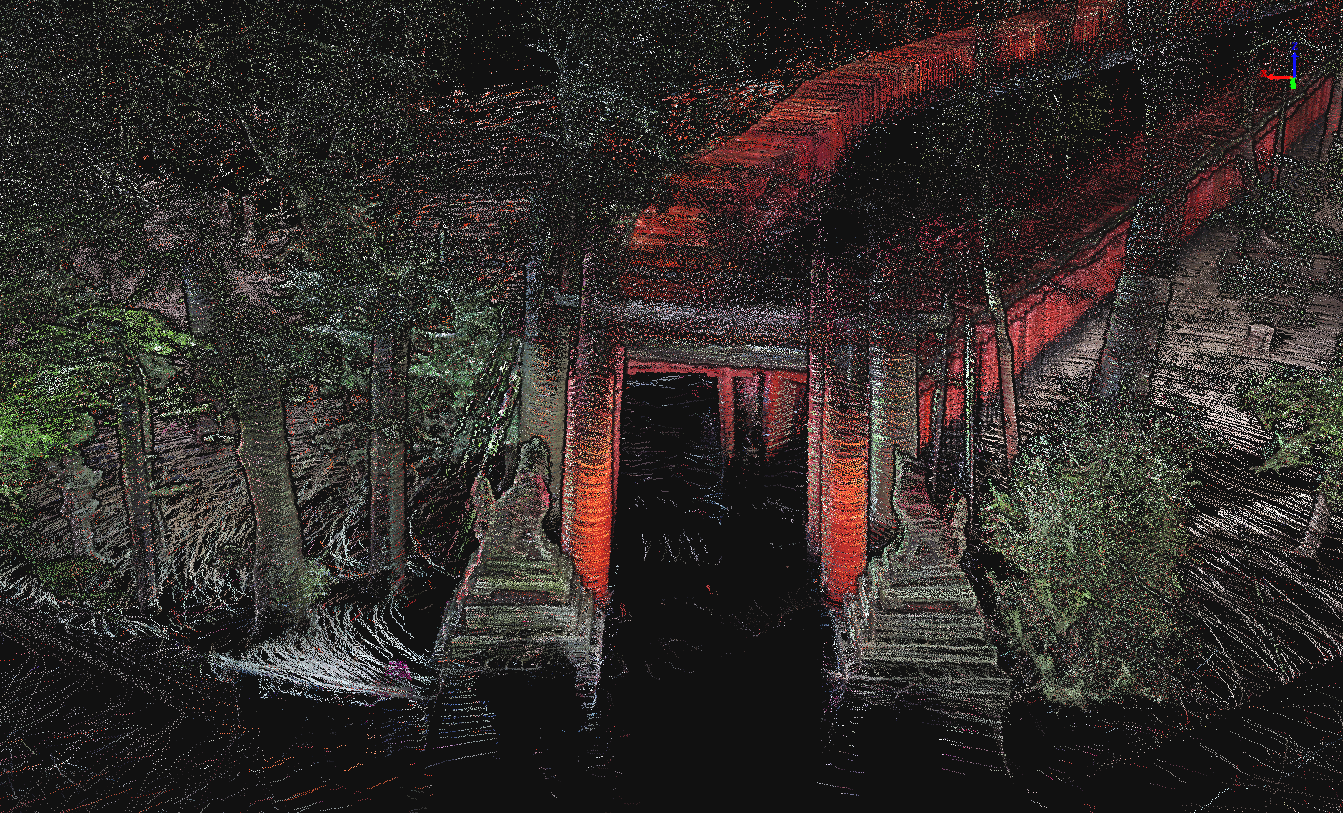
デモ20:京都市内 / 仁和寺(世界遺産)
| 場所 | 京都市内 / 仁和寺(世界遺産) |
|---|---|
| 実施日 | 2020年4月9日(木) |
| 使用ツール | バックパック型LiDAR / Libackpack DGC50 |
| 天候 | 晴れ |
| 詳細 | 弊社インナーマーカー機を利用して、バックパック型LiDARで取得した点群データをガラス内部にマーキングしてみました。 |
| 参考 | 3Dインナーマーカー Greenvalleyのページ デモ22:京都市内 / 仁和寺(世界遺産) |
デモ動画


デモ画像

デモ21:大阪府吹田市 / 万博記念公園
| 場所 | 大阪府吹田市 / 万博記念公園の森 |
|---|---|
| 実施日 | 2020年8月某日 |
| 使用ツール | バックパック型LiDAR / Libackpack DG50(旧製品) |
| 天候 | 晴れ |
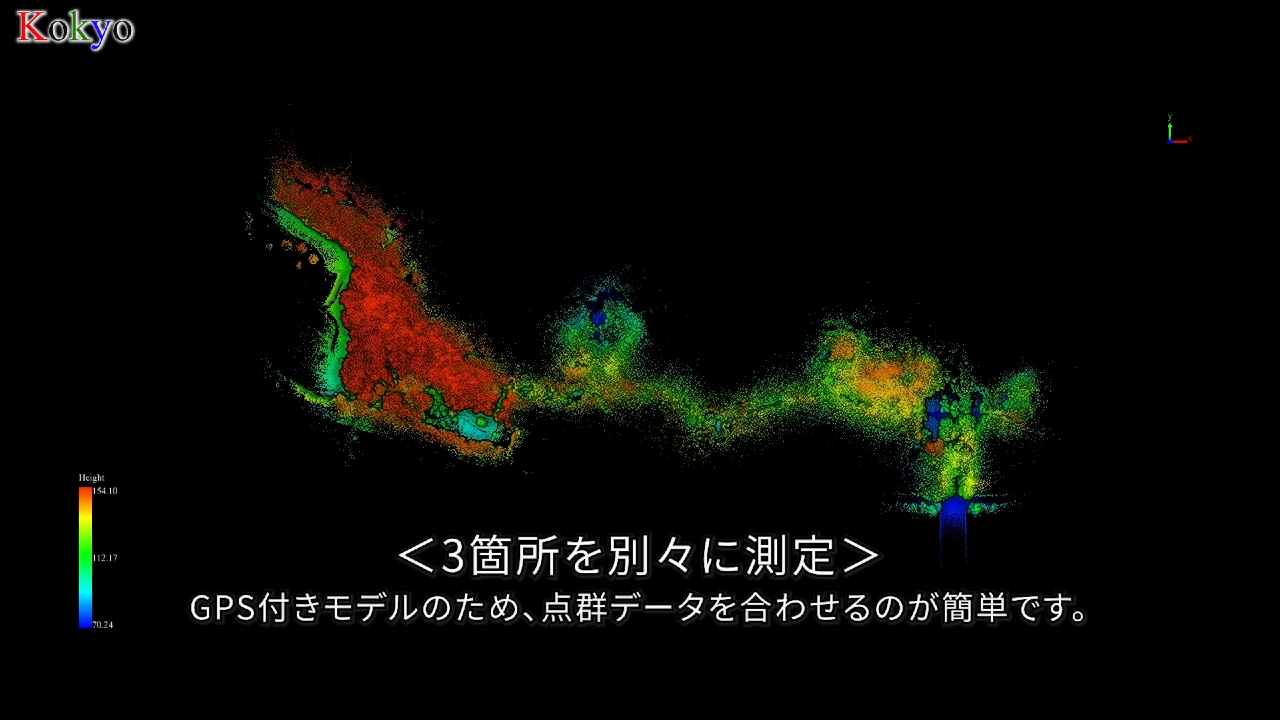
| 詳細 | レンタル機「DG50」を使用し、お客様が測定。 GPS付きモデルのため、別々に測定した点群データを位置情報を元にソフトウェア上で合わせることが出来ます。 |
| 参考 | Greenvalleyのページ |
デモ動画

デモ画像

デモ22:京都市内 / 仁和寺(世界遺産)
| 場所 | 京都市内 / 仁和寺(世界遺産) |
|---|---|
| 実施日 | 2020年11月10日(火) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
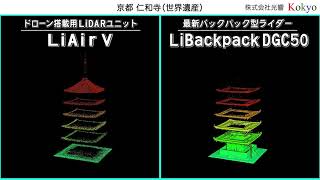
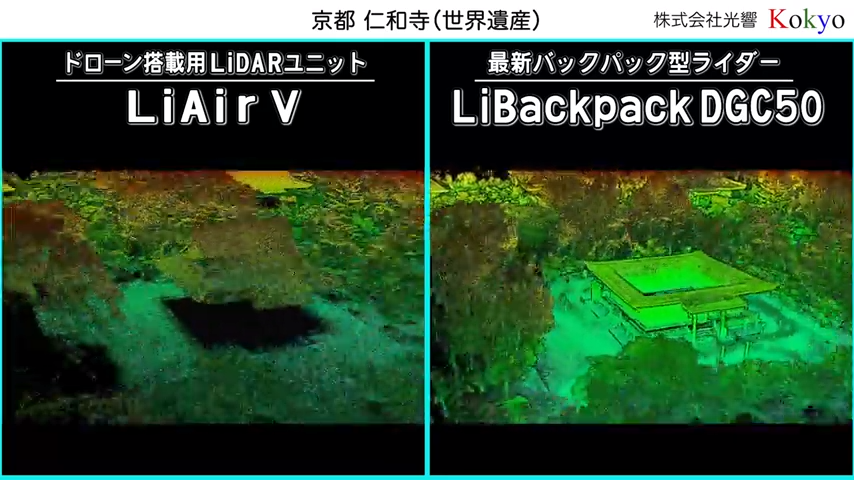
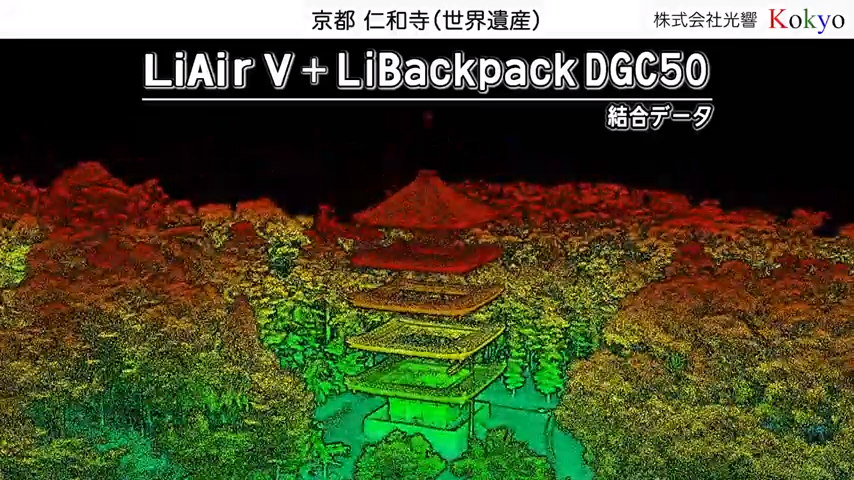
| 詳細 | 弊社取り扱いのドローン搭載用LiDAR「LiAirV」で点群データと、バックパック型LiDAR「DGC50」で取得した点群をソフトウェア上で結合できます。 地上と空から計測することで、より精密な点群データの取得が出来ます。 |
| 参考 | Greenvalleyのページ ドローン搭載用 LiAir Vのページ デモ20:京都市内 / 仁和寺(世界遺産) |
デモ動画
デモ画像

デモ23:京都市内 / 烏丸通り
| 場所 | 京都市内 / 烏丸通り |
|---|---|
| 実施日 | 2022年04月21日(木) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
| 詳細 | ハンドヘルド型LiDAR /LiGripの使い方動画です。軽量設計のコンパクトなボディを採用し、LiDARと最先端のSLAMアルゴリズムを組み合わせることで、最も困難な環境においても高精度なHDマッピングを実現します。 |
| 参考 | Greenvalleyのページ ハンドヘルド型LiDAR/LiGripのページ |
使い方動画

画像


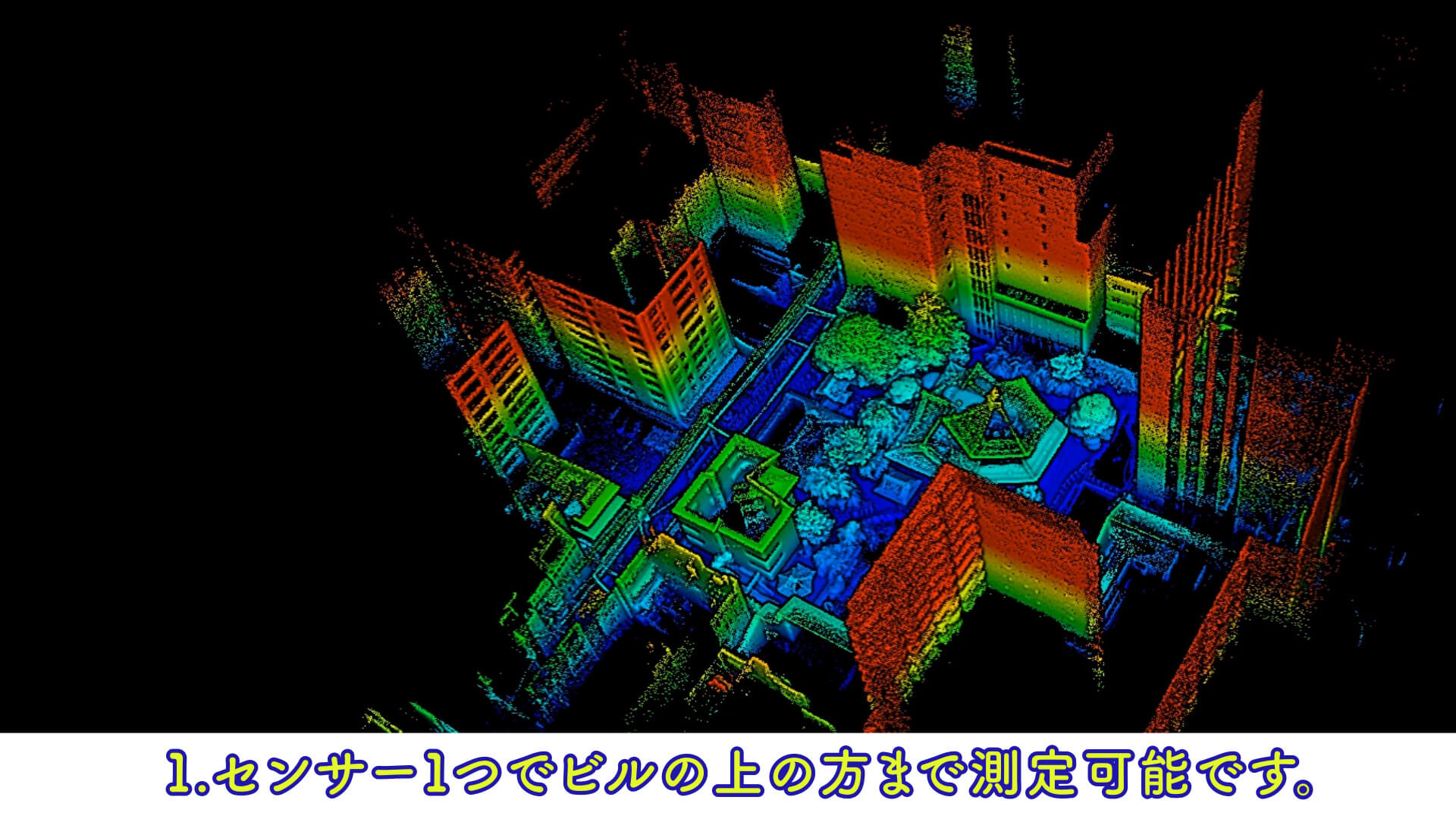
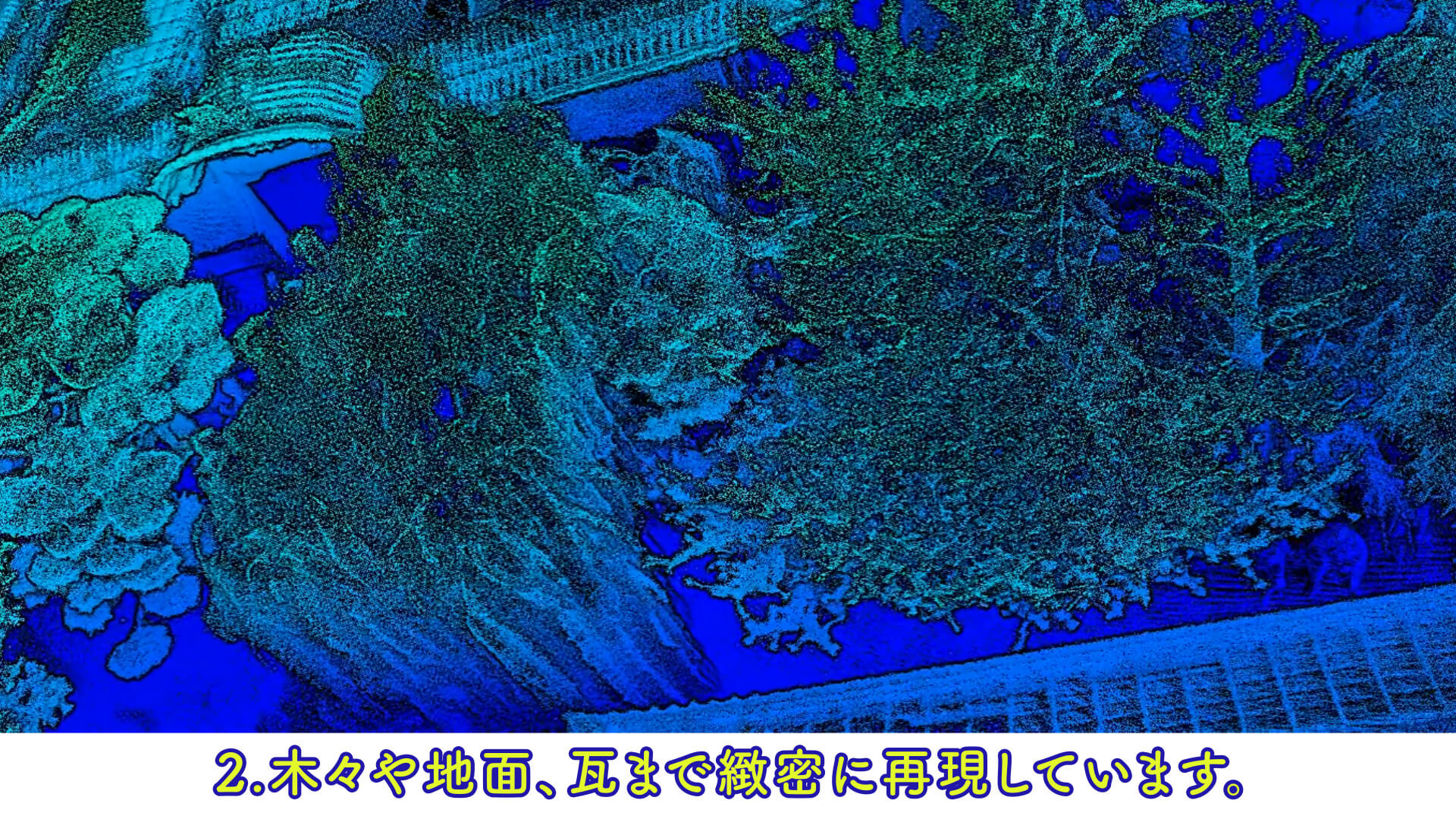
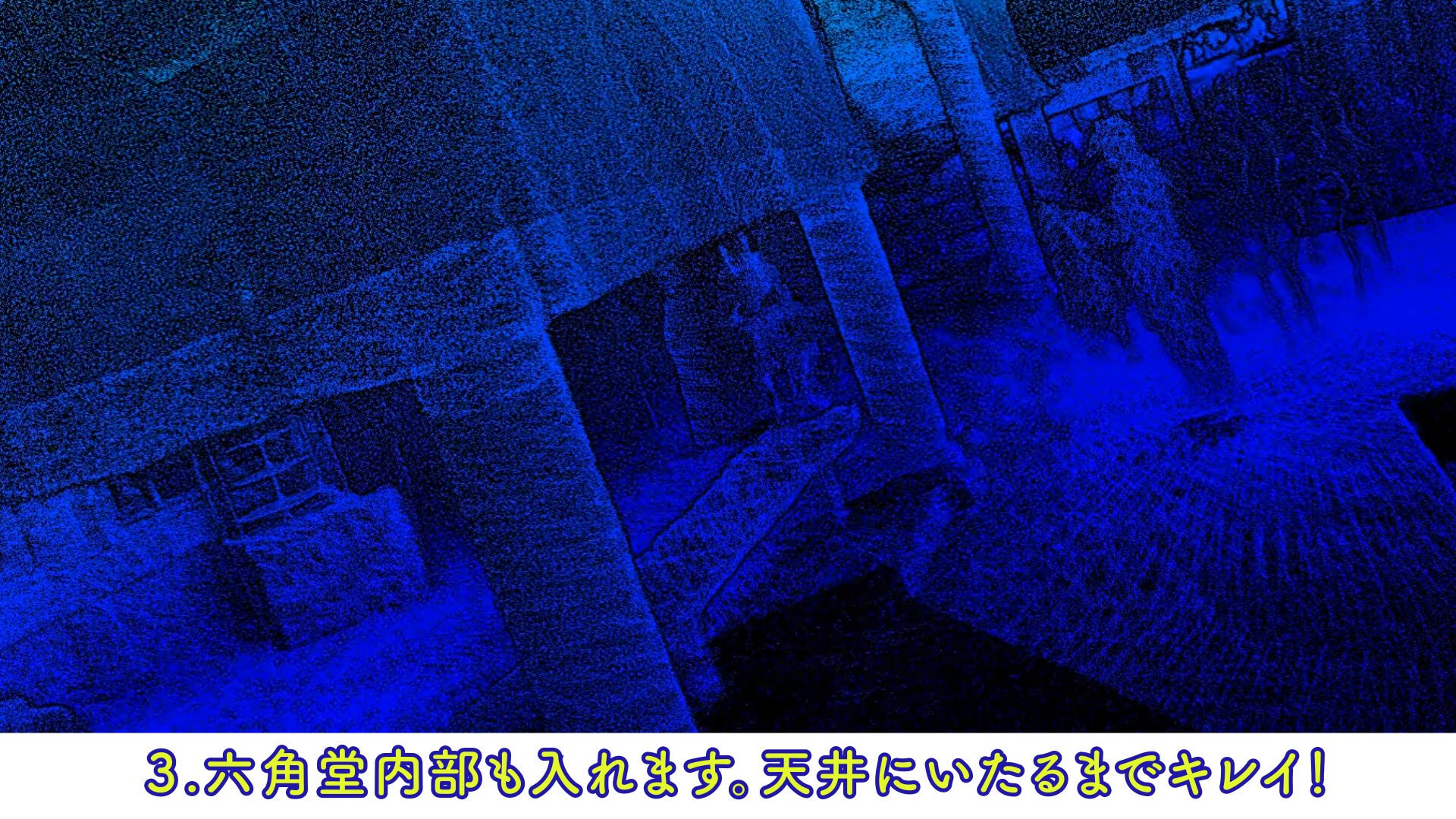
デモ24:京都市内 / 紫雲山頂法寺(六角堂)
| 場所 | 京都市内 / 紫雲山頂法寺(六角堂) |
|---|---|
| 実施日 | 2022年04月05日(火) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
| 詳細 | 軽量設計のコンパクトなボディを採用し、LiDARと最先端のSLAMアルゴリズムを組み合わせることで、最も困難な環境においても高精度なHDマッピングを実現します。 |
| 参考 | Greenvalleyのページ ハンドヘルド型LiDAR/LiGripのページ |
デモ動画(リンク切れ)
デモ画像
デモ25:京都市内 / 桜の木の下
| 場所 | 京都市内 / 桜の木の下 |
|---|---|
| 実施日 | 2022年04月04日(火) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
| 詳細 | 軽量設計のコンパクトなボディを採用し、LiDARと最先端のSLAMアルゴリズムを組み合わせることで、最も困難な環境においても高精度なHDマッピングを実現します。 |
| 参考 | Greenvalleyのページ ハンドヘルド型LiDAR/LiGripのページ |
デモ動画

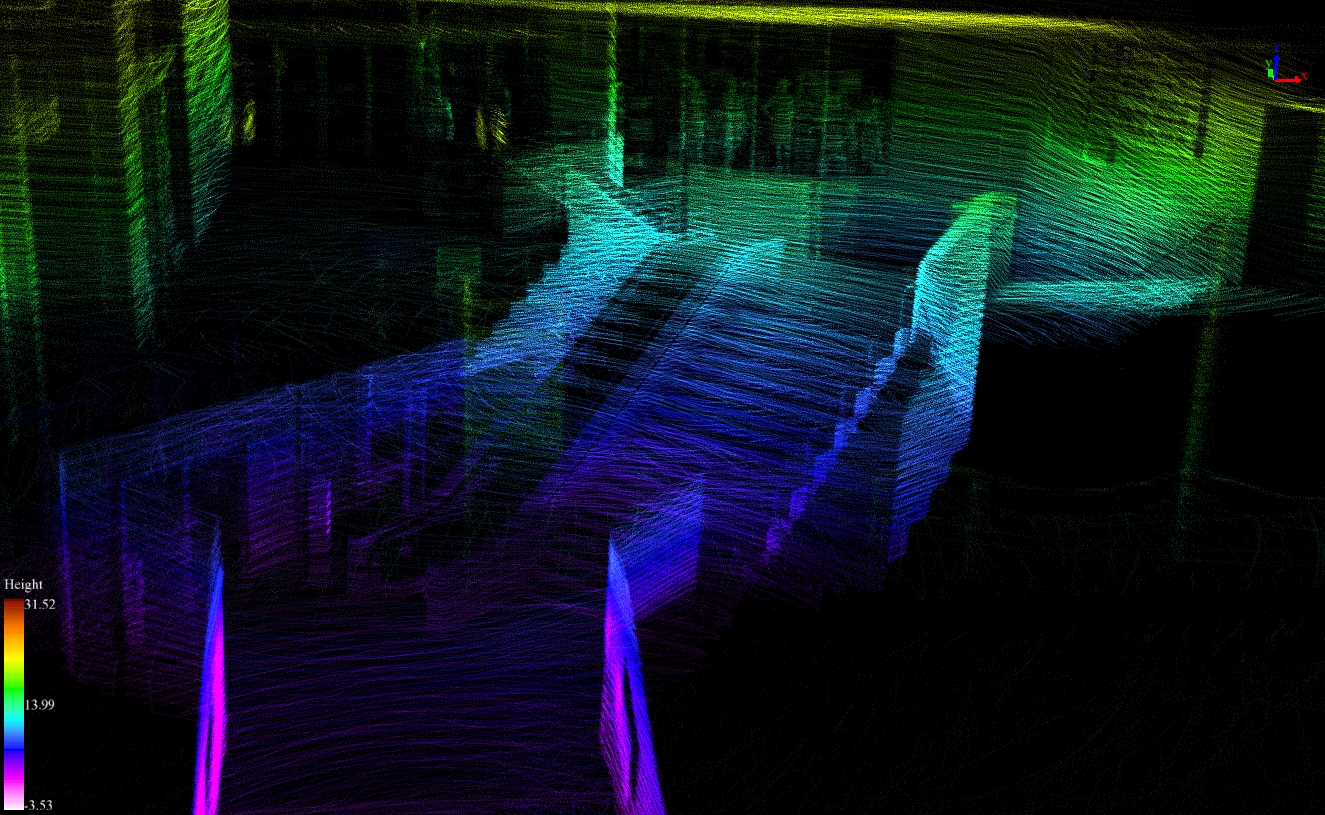
デモ26:京都市内 / 四条烏丸地下街
| 場所 | 京都市内 / 四条烏丸地下 |
|---|---|
| 実施日 | 2022年06月09日(木) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
| 詳細 | 軽量設計のコンパクトなボディを採用し、LiDARと最先端のSLAMアルゴリズムを組み合わせることで、最も困難な環境においても高精度なHDマッピングを実現します。 |
| 参考 | Greenvalleyのページ ハンドヘルド型LiDAR/LiGripのページ |
デモ動画
デモ27:京都市内 / 祇園祭
| 場所 | 京都市内 / 祇園祭 |
|---|---|
| 実施日 | 2022年07月13日(水) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
| 詳細 | 軽量設計のコンパクトなボディを採用し、LiDARと最先端のSLAMアルゴリズムを組み合わせることで、最も困難な環境においても高精度なHDマッピングを実現します。 |
| 参考 | Greenvalleyのページ ハンドヘルド型LiDAR/LiGripのページ |
デモ動画
- リンク切れ
デモ28:京都市内 / 祇園祭
| 場所 | 京都市内 / 祇園祭(夕方) |
|---|---|
| 実施日 | 2022年07月14日(木) |
| 使用ツール | ハンドヘルド型LiDAR/LiGrip |
| 天候 | 晴れ |
| 詳細 | 軽量設計のコンパクトなボディを採用し、LiDARと最先端のSLAMアルゴリズムを組み合わせることで、最も困難な環境においても高精度なHDマッピングを実現します。 |
| 参考 | Greenvalleyのページ ハンドヘルド型LiDAR/LiGripのページ |
デモ動画
- リンク切れ