SLAMTEC RoboStudioの使い方
LiDARの接続方法と点群表示まで解説
SLAMTEC製品の表示・管理用ソフトとして利用される代表的なツールが「RoboStudio」です。RoboStudioでは、ロボットやLiDARの状態確認、センサーデータの表示、マップ確認、各種制御を行えます。このうち、LiDAR単体の接続確認やスキャン表示に使うのが、RoboStudio内の FrameGrabber機能です。
本記事では、RoboStudioを使ってLiDARを接続し、点群表示を確認するまでの手順を中心に解説します。
RoboStudioのダウンロードとインストール
RoboStudioは、以下の公式ページからダウンロードできます。
RoboStudio 公式ページ(https://www.slamtec.com/en/robostudio)
Windows版とAndroid版が用意されていますが、今回の手順はWindows版のRoboStudio Desktopを前提にしています。
USB接続時の事前準備
LiDARをUSBで接続する場合は、RoboStudioのインストール前または接続前に、CP210x VCPドライバ をインストールしておくとスムーズです。
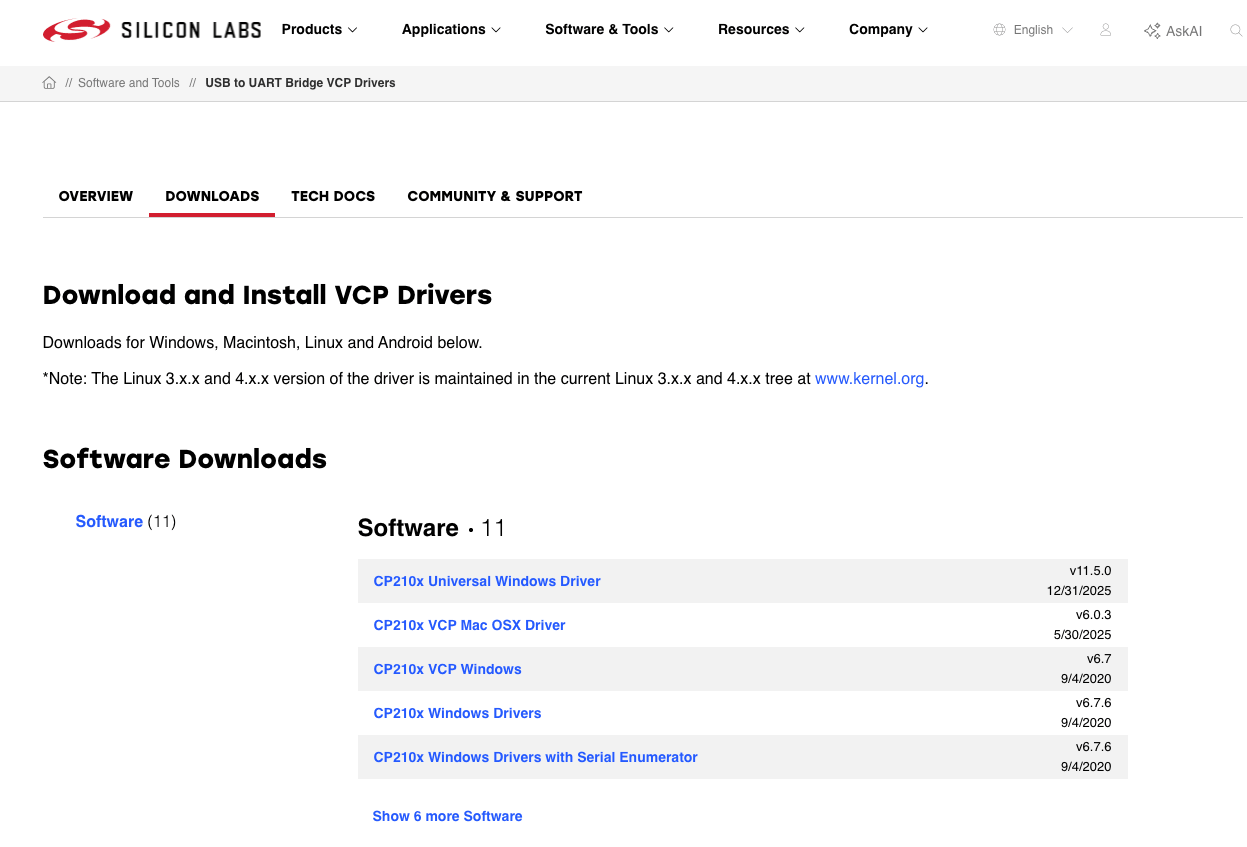
CP210x VCPドライバは、Silicon Labsのダウンロードページから取得できます。
CP210x VCPドライバ(Silicon Labs)https://www.silabs.com/software-and-tools/usb-to-uart-bridge-vcp-drivers?tab=downloads
Windows PCで利用する場合は、通常 CP210x Universal Windows Driver を選択します。ダウンロード後、LiDARを接続する前にインストールしておいてください。
LiDARをUSBで接続する場合は、RoboStudioのインストール前または接続前に、CP210x VCPドライバ をインストールしておくとスムーズです。
CP210x VCPドライバは、Silicon Labsのダウンロードページから取得できます。
CP210x VCPドライバ(Silicon Labs)https://www.silabs.com/software-and-tools/usb-to-uart-bridge-vcp-drivers?tab=downloads
Windows PCで利用する場合は、通常 CP210x Universal Windows Driver を選択します。ダウンロード後、LiDARを接続する前にインストールしておいてください。
RoboStudio起動時の画面
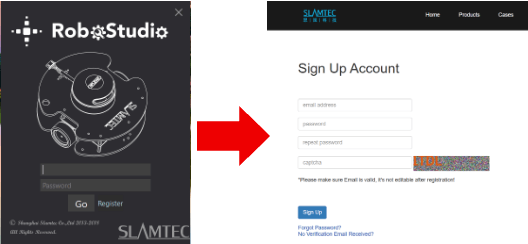
RoboStudioを起動すると、利用環境に応じてログイン画面が表示されます。
メールアドレスとパスワードでログインする形式です。
ネットワーク接続をご利用の場合は、登録が必要になります。
初めて利用する場合は、Registerボタンからアカウント登録を行ってからご利用下さい。
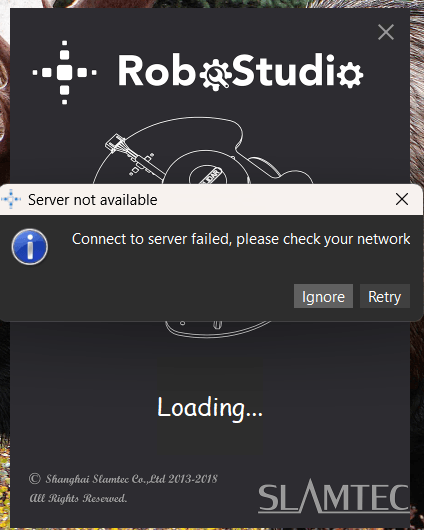
ネットワーク接続を利用した接続を行わない場合は、ネットワークをオフラインの状態でRoboStudioを起動して下さい。画像のメッセージが起動しますので、【Ignore】をクリックするとオフラインモードで起動できます。
LiDARの接続方法(RoboStudio Desktop版)
ここからは、RoboStudioでLiDARを接続し、点群表示を行う手順を説明します。
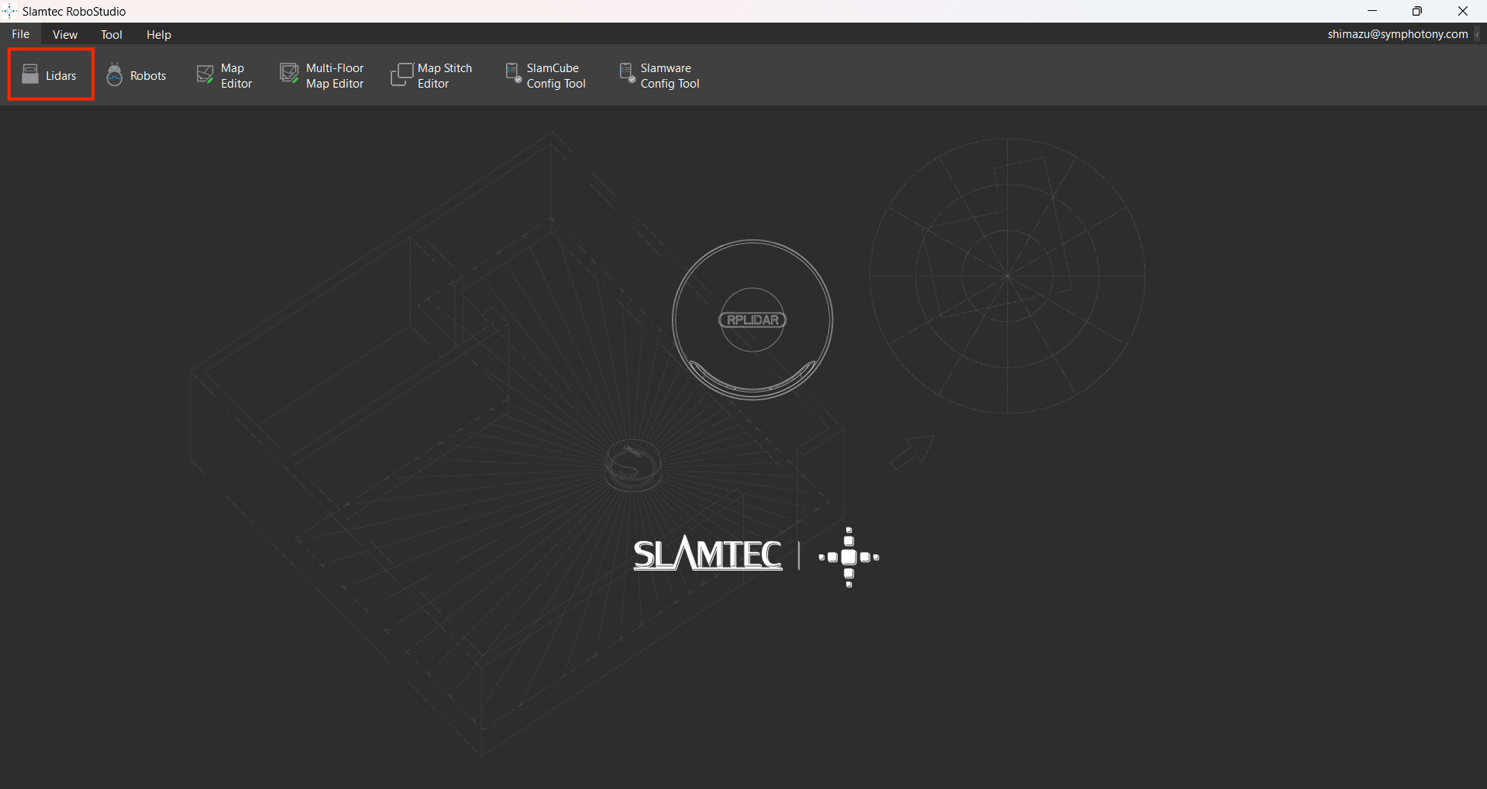
Lidarsパネルを開く
RoboStudioで 【Lidars】 をクリックすると、画面左側に Lidarsパネル が表示されます。
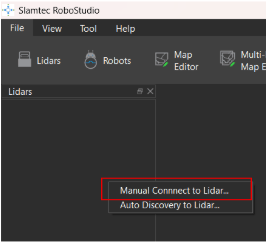
手動接続画面を開く
Lidarsパネル内の空白部分を右クリックすると、メニューが表示されます。ここで Manual Connect Lidar を選択すると、接続設定画面が開きます。
USB接続でLiDARを接続する
USBで接続している場合は、USBまたはシリアル接続の項目にCOMポート番号が表示されます。
接続しているLiDARに対応するCOMポートを選び、Connect をクリックします。
接続が成功すると、Lidarsパネル内に接続中の機器が表示されます。
※ 接続するCOMポートが分からない場合は、Windowsのデバイスマネージャーで確認してください。
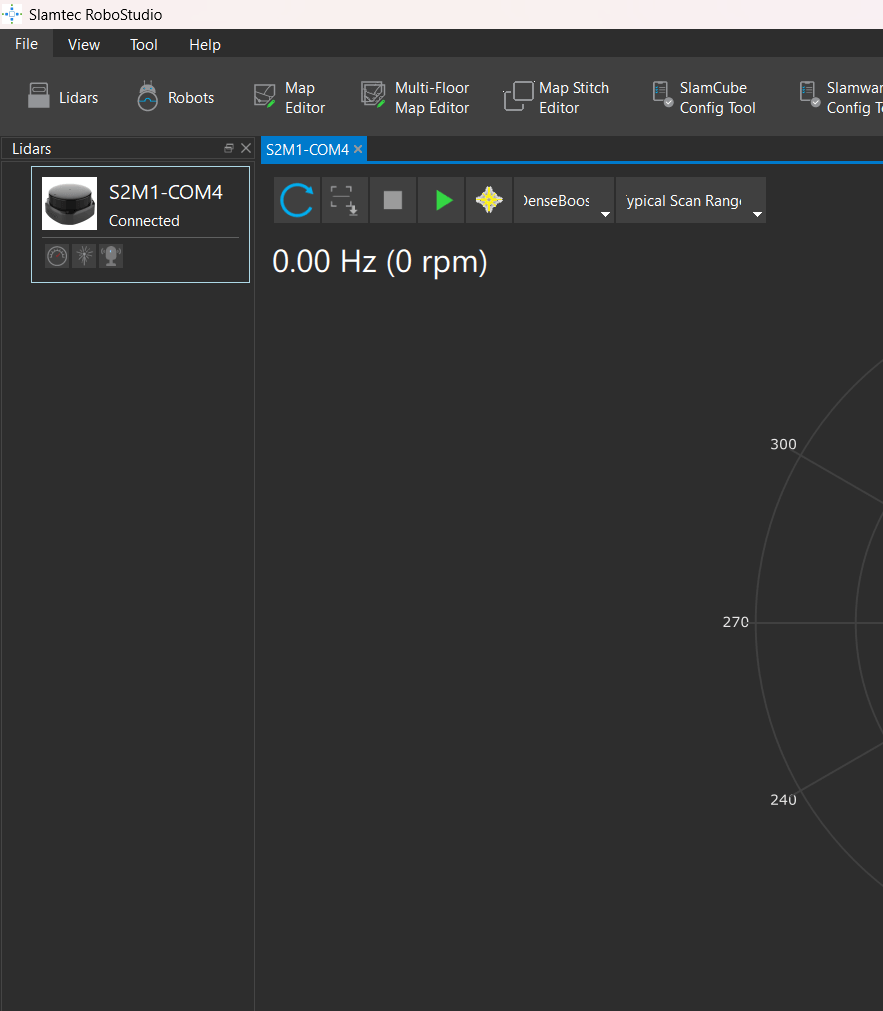
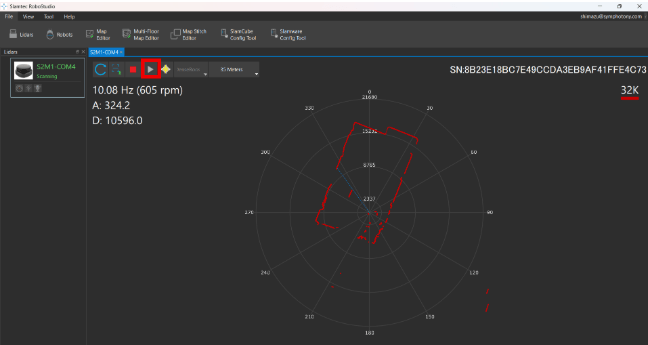
点群を表示する
接続したLiDARをダブルクリックするか、観測用の「▶」ボタンを押すと、点群表示を確認できます。
LiDAR観測ウィンドウの基本操作
観測ウィンドウでは、スキャン状態の確認や表示設定の切り替えが行えます。
上部ツールバーの主な機能
観測ウィンドウ上部の主なボタンは以下のとおりです。
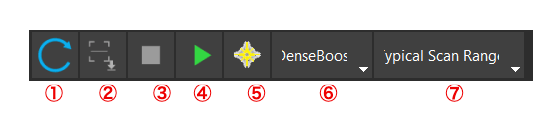
① 再起動
スキャンコアを再起動し、内部エラーのリセットを行います。
② スキャンデータ保存
現在のスキャンデータをローカルファイルに保存します。
③ スキャン停止
LiDARのスキャンを停止します。
④ スキャン開始
LiDARのスキャンを開始します。
⑤ 表示モード切替
機種や設定に応じて、表示方法の切り替えに関係する機能です。
⑥ 感度切り替え
環境に応じて感度や動作モードを切り替えます。
⑦ 表示範囲切り替え
画面上に表示するスキャン範囲を切り替えます。
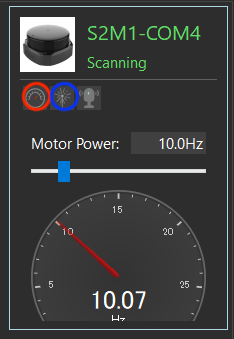
モーター速度の調整
スキャン中は、LiDAR一覧の下部にあるモーター速度調整ボタンから、回転速度を変更できます。
スキャン処理中に、表示されている機器の下にある赤丸部分を選択すると回転速度の調整ができます。
また、青丸部分を押すと、設定した状態で新しいタブを作成することができます。
観測画面では、マウス操作で表示範囲や位置を調整できます。
- 画面移動
左ボタンを押しながらドラッグすると、表示位置を移動できます。 - 拡大・縮小
マウスホイールを回すと、表示範囲を拡大・縮小できます。 - 素早い拡大・縮小
Ctrlキーを押しながらマウスホイール を操作すると、表示範囲を大きく変更できます。 - 表示中心のリセット
観測画面上でダブルクリックすると、表示位置をリセットできます。
RoboStudioでLiDARが接続できないときの確認ポイント
LiDARが正常に表示されない場合は、次の点を確認してください。
- CP210xドライバが正しくインストールされているか
- 正しいCOMポートを選択しているか
- USBケーブルや給電状態に問題がないか
- LiDAR本体が正常に起動しているか
- RoboStudio側でスキャン開始操作を行っているか
※USB接続時は、ドライバ未導入またはCOMポート選択ミスが原因になることが多いため、まずこれらの点を確認するのがおすすめです。