電動リニアステージ
低コストのリニア単軸ステージ

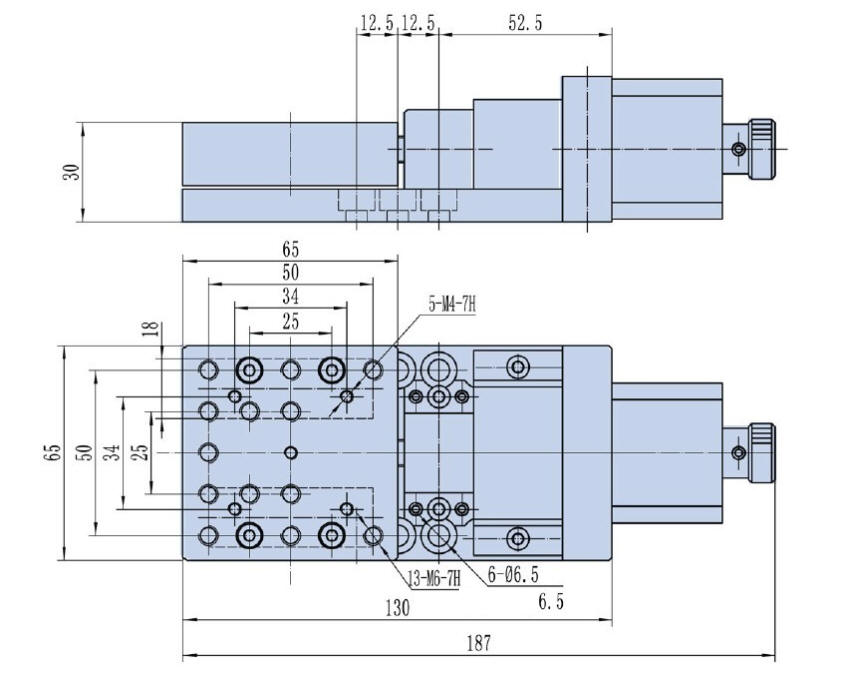
電動単軸テーブル / AQ110-15
この電動ポジショニングテーブルは、上品な黒色アルマイト処理を施したアルミニウム合金製です。
ステッピングモーターによる最高速度5 mm/秒で、移動量は15 mmです。駆動機構はリードスクリューです。
ベンチサイズは65×65 mm、本体重量は1.2 kgです。
ステージテーブルの最大荷重は10 kgです。
リニアステージは、三相ブラシレスモーターと光学式エンコーダ(-04バージョン)を搭載したモデルもご用意しています。
モーターに搭載されたノブで手動調整が可能です。このノブを光学式エンコーダ(-04バージョン)に交換することで、高精度な位置確認が可能になります。
このステージには、RS-232、USB、ジョイスティック、キーパッドによる制御が可能な、プラグアンドプレイ対応のモーションコントローラーが必要です。
仕様
| Type | AQ110-15 | ||
|---|---|---|---|
| 構造の説明 | トラベル | 15 mm | |
| テーブルサイズ | 65 mm x 65 mm | ||
| リードスクリューピッチ | 1回転あたり1 mm | ||
| トラベルガイド | 高精度クロスローラー | ||
DB-9 Male Connector
|
2相ステッピングモーター | ||
| 標準相抵抗 | 3.8 Ohms, 双方向 | ||
| 標準相電流 | 1 Amp | ||
| ピンの割り当てと説明 | |||
| 1 | リミットセンサー用 +5 VDC | ||
| 2 | 遠端リミットスイッチ オープンコレクタまたはノーマリーオープン プルアップ抵抗が必要(通常1000Ω) 遠端ハードストップから約2.5mm離れた位置 |
||
| 3 | モーターリミットスイッチの近く オープンコレクタまたはノーマリーオープン プルアップ抵抗が必要(通常1000Ω) モーター側ハードストップから約2.5mm離れた場所 |
||
| 4 | +5 VDC リターン | ||
| 5 | 未接続 | ||
| 6 | ステッピングモーター A相+ | ||
| 7 | ステッピングモーター A相- | ||
| 8 | ステッピングモーター B相+ | ||
| 9 | ステッピングモーター B相- | ||
| 本体材質 | アルミニウム合金 | ||
| 表面処理 | ブラックアルマイト加工 | ||
| 耐荷重 | 15 kg | ||
| 重量 | 1.2 kg | ||
| 標準精度 | 解像度 | 制御エレクトロニクスに依存、ステップモータードライバー1台あたり10マイクロステップで0.5ミクロン | |
| ステップモータードライバー1台あたり20マイクロステップで0.25ミクロン | |||
| ステッピングモーター使用時の最高速度 | 15 mm / sec | ||
| サーボモーター使用時の最高速度 | |||
| 位置決め精度 | 10 microns | ||
| アクセサリーの説明 | 位置決め再現性 | 5 microns | |
| 光学式エンコーダ(-04バージョン) | |||
| 三相ブラシレス三相ブラシレスサーボモーターと光学式エンコーダ(-02バージョン) | |||
ステッピングモーター駆動の機械図面
Z軸アクチュエータ

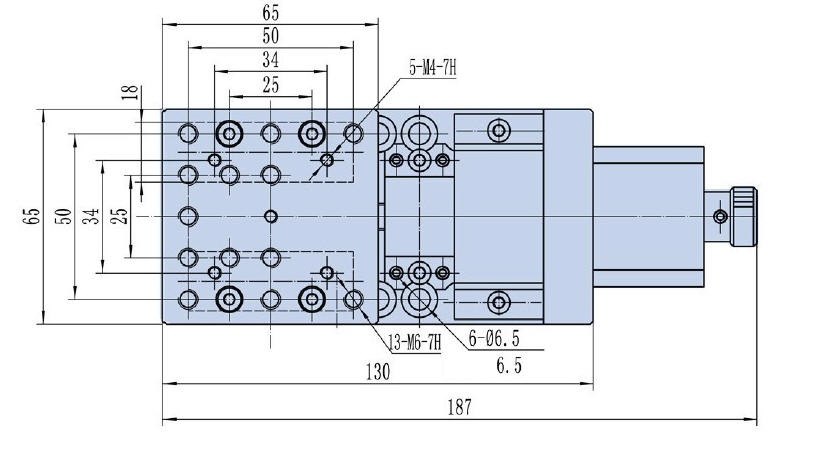
電動Z軸テーブル / Z110-15
この電動ポジショニングテーブルは、上品な黒色アルマイト処理を施したアルミニウム合金製です。
ステッピングモーターにより、最高速度5 mm/秒で15 mmの移動量を実現します。駆動機構はリードスクリューです。
ベンチサイズは65×65 mm、本体重量は1.2 kgです。
ステージテーブルの最大荷重は10 kgです。
リニアステージは、三相ブラシレスモーターと光学式エンコーダを搭載したモデルもご用意しています。
モーターに搭載されたノブで手動調整が可能です。このノブを光学式エンコーダに交換することで、高精度な位置確認が可能です。
このステージには、RS-232、USB、ジョイスティック、キーパッドによる制御が可能な、プラグアンドプレイ対応のモーションコントローラーが必要です。
仕様
| Type | Z110-15 | ||
|---|---|---|---|
| 構造の説明 | トラベル | 15 mm | |
| テーブルサイズ | 65 mm x 65 mm | ||
| リードスクリューピッチ | 1回転あたり1 mm | ||
| トラベルガイド | 高精度クロスローラー | ||
DB-9 Male Connector
|
二相ステッピングモーター | ||
| 標準相抵抗 | 3.8 Ohms, Bi-directional | ||
| 標準相電流 | 1 Amp | ||
| ピンの割り当てと説明 | |||
| 1 | リミットセンサー用 +5 VDC | ||
| 2 | CCWリミットスイッチ テーブルがモーターから離れます ノブは反時計回りに回転します オープンコレクタ ノーマリーオープン プルアップ抵抗が必要です(通常1000Ω) |
||
| 3 | CWリミットスイッチ テーブルがモーターに向かって動きます ノブは時計回りに回転します オープンコレクタ ノーマリーオープン プルアップ抵抗が必要です(通常1000Ω) |
||
| 4 | +5 VDC リターン | ||
| 5 | 未接続 | ||
| 6 | ステッピングモーター A相+ | ||
| 7 | ステッピングモーター A相- | ||
| 8 | ステッピングモーター B相+ | ||
| 9 | ステッピングモーター B相- | ||
| 本体材質 | アルミニウム合金 | ||
| 表面処理 | ブラックアルマイト加工 | ||
| 耐荷重 | 5 kg | ||
| 重量 | 1.2 kg | ||
| 標準精度 | 解像度 | 制御エレクトロニクスに依存、ステップモータードライバー1台あたり10マイクロステップで0.5ミクロン | |
| ステップモータードライバー1台あたり20マイクロステップで0.25ミクロン | |||
| ステッピングモーター使用時の最高速度 | 5 mm / sec | ||
| サーボモーター使用時の最高速度 | |||
| 位置決め精度 | 10 microns | ||
| アクセサリーの説明 | 位置決め再現性 | +/- 2 microns | |
| 光学式エンコーダー | |||
| 三相ブラシレスサーボモーターと光学式エンコーダー(-02バージョン) | |||
ステッピングモーター駆動の機械図面
XY軸アクチュエータ
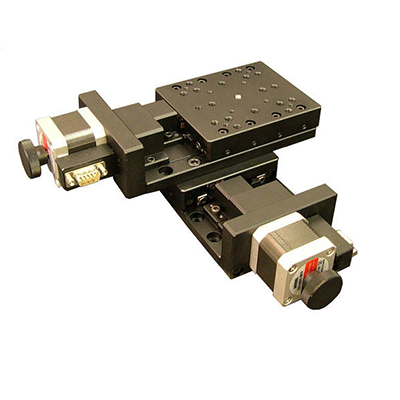
最大移動量は1000 mm、最高速度は50 mm/秒です。
駆動機構は高精度クロスローラーです。
これらのリニアステージは、サーボモーター(-02)と光学式エンコーダを搭載したモデルもご用意しています。
モーターに搭載されたノブで手動調整が可能です。これらのノブを光学式エンコーダに交換することで、高精度な位置確認が可能になります。
このステージには、RS-232、USB、ジョイスティック、トラックボール、キーパッドによる制御機能を備えた、プラグアンドプレイ対応のモーションコントローラーが必要です。
仕様
| 構造の説明 | トラベル | 移動範囲(mm) | リードスクリューのピッチ | 解像度 | 最高速度 |
|---|---|---|---|---|---|
| 15 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 30 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 50 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 75 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 100 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 150 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 200 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 300 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 400 | 5 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 500 | 5 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| トラベルガイド | 高精度クロスローラー | ||||
| Motor
|
Typical Phase Resistance | 3.8 Ohms, 双方向 | |||
| Typical Phase Current | 1 Amp | ||||
| DB-9 オスコネクタ ピン配置と説明 |
|||||
| 1 | リミットセンサー用 +5 VDC | ||||
| 2 | 遠端リミットスイッチ オープンコレクタまたはノーマリーオープン プルアップ抵抗が必要(通常1000Ω) |
||||
| 3 | モーターリミットスイッチの近く オープンコレクタまたはノーマリーオープン プルアップ抵抗が必要(通常1000Ω) |
||||
| 4 | +5 VDC リターン | ||||
| 5 | 未接続 | ||||
| 6 | ステッピングモーター A相+ | ||||
| 7 | ステッピングモーター A相- | ||||
| 8 | ステッピングモーター B相+ | ||||
| 9 | ステッピングモーター B相- | ||||
| 本体材質 | アルミニウム合金 | ||||
| 表面処理 | 黒色アルマイト処理 | ||||
| 標準精度 | 分解能 | 設定により異なります | |||
| 再現性 | 5 microns | ||||
| 位置決め精度 | 10 microns | ||||
| アクセサリーの説明 | オプションの光学式エンコーダ (-04) その他のサイズとストロークもご用意しております |
||||
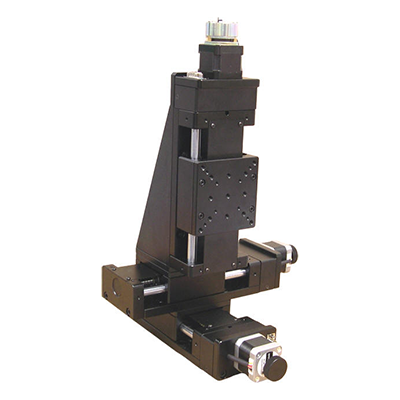
XZ軸アクチュエータ

最大1000 mmの移動量を実現します。
駆動機構は高精度クロスローラーです。
これらのリニアステージは、サーボモーターと光学式エンコーダを搭載したモデルもご用意しています。
モーターに搭載されたノブで手動調整が可能です。また、これらのノブを光学式エンコーダに交換することで、高精度な位置確認が可能です。
このシリーズには、RS-232、USB、ジョイスティック、トラックボール、キーパッドによる操作が可能な、プラグアンドプレイ対応のモーションコントローラーが必要です。
仕様
| 構造の説明 | トラベル | 移動範囲(mm) | リードスクリューのピッチ | 解像度 |
|---|---|---|---|---|
| 15 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 30 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 50 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 75 | 1 mm per turn | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 100 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 150 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 200 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 300 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 400 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 500 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 600 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 700 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 800 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 900 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| 1000 | 4 mm per turn | 2ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | ||
| トラベルガイド | 高精度クロスローラー | |||
| DB-9 Male Connector
|
標準相抵抗 | 3.8 Ohms, Bi-directional | ||
| 標準相電流 | 1 Amp | |||
| ピンの割り当てと説明 | ||||
| 1 | リミットセンサー用 +5 VDC | |||
| 2 | CWリミットスイッチ、オープンコレクタ、ノーマリーオープン、プルアップ抵抗(1000Ω)が必要 | |||
| 3 | CCWリミットスイッチ、オープンコレクタ、ノーマリーオープン、プルアップ抵抗(1000Ω)が必要 | |||
| 4 | +5 VDCのリターン | |||
| 5 | 未接続 | |||
| 6 | ステッピングモーター A相+ | |||
| 7 | ステッピングモーター A相- | |||
| 8 | ステッピングモーター B相+ | |||
| 9 | ステッピングモーター B相- | |||
| 本体材質 | アルミニウム合金 | |||
| 表面処理 | 黒色アルマイト処理 | |||
| 標準精度 | 分解能 | 構成により異なります | ||
| ステッピングモーター使用時の最高速度 | 5 mm/秒 | |||
| サーボモーター使用時の最高速度 | ||||
| 繰り返し精度 | 1ミクロン | |||
| 位置精度 | 10ミクロン | |||
| アクセサリーの説明 | 光学式エンコーダ(オプション) | |||
| サーボモーター(オプション) | ||||
| その他のサイズおよびストロークもご用意しております | ||||
XYZ軸アクチュエータ
オプションでZ軸用ロックブレーキもご用意しています。
このシリーズには、RS-232、USB、ジョイスティック、トラックボール、キーパッド制御を備えた完全なプラグアンドプレイシステムとしてご注文いただけるモーションコントローラが必要です。
仕様
| 構造の説明 | トラベル | 移動範囲(mm) | リードスクリューのピッチ | 解像度 | 最高速度 |
|---|---|---|---|---|---|
| 15 | 1回転あたり1mm | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 30 | 1回転あたり1mm | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 50 | 1回転あたり1mm | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 75 | 1回転あたり1mm | 0.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 15 mm / sec | ||
| 100 | 1回転あたり4 mm(オプションで1回転あたり1 mm) | 2ミクロン(使用中のステッピングモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 150 | 1回転あたり4 mm(オプションで1回転あたり1 mm) | 2ミクロン(使用中のステッピングモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 200 | 1回転あたり4 mm(オプションで1回転あたり1 mm) | 2ミクロン(使用中のステッピングモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 300 | 1回転あたり4 mm(オプションで1回転あたり1 mm) | 2ミクロン(使用中のステッピングモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 400 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 500 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 600 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 700 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 800 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 900 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| 1000 | 1回転につき5 mm(オプションで1 mm) | 2.5ミクロン(使用中のステップモータードライバー1台あたり10マイクロステップ) | 50 mm / sec | ||
| トラベルガイド | 高精度クロスローラー | ||||
| Stepper Motor | 1回転あたりのステップ数 | 200 | |||
| 標準相抵抗 | 3.8 Ohms, 双方向 | ||||
| 標準相電流 | 1 Amp | ||||
| DB-9 Male Connector ピンの割り当てと説明 |
|||||
| 1 | リミットセンサー用 +5 VDC | ||||
| 2 | 遠端リミットスイッチ オープンコレクタまたはノーマリーオープン プルアップ抵抗が必要(通常1000Ω) |
||||
| 3 | モーターリミットスイッチの近く オープンコレクタまたはノーマリーオープン プルアップ抵抗が必要(通常1000Ω) |
||||
| 4 | +5 VDC リターン | ||||
| 5 | 未接続 | ||||
| 6 | ステッピングモーター A相+ | ||||
| 7 | ステッピングモーター A相- | ||||
| 8 | ステッピングモーター B相+ | ||||
| 9 | ステッピングモーター B相- | ||||
| ボディ素材 | アルミニウム合金 | ||||
| 表面処理 | ブラックアルマイト加工 | ||||
| アクセサリーの説明 | オプションの光学式エンコーダ オプションのサーボモーター オプションのブレーキ |
||||