ピエゾアシストモータ

- ピエゾアシストモータとは大変位(ロングストローク)かつ高分解能、高推力を出力できるモータです。
- PAM3-6.5及びPAM6-13の出力推力はそれぞれ13N及び29Nです。一方、PAM3-6.5及びPAM6-13の変位量はそれぞれ6.5㎜と13㎜で,分解能はそれぞれ30nm及び25nm以下です。
- 名刺サイズ以下で小型であるため、簡単に持ち運びすることができ、使用方法もとても簡単。
- 科学研究及び工業用途のために、設計されたモータであり、下記の用途に適しています。
- 顕微鏡のスキャニング
- 高速スループット顕微鏡
- 高分解能顕微鏡
- マイクロマニピュレーション
- バイオテクノロジー
- 干渉計形状測定
- マスク/ウエハー位置決め
- 計測技術
- ミラーホルダー角度調整
- 駆動するには、専用のコントローラ(PAMC-104)および専用ソフトをご使用ください。また、専用ケーブル(2m)を付属されています。
*「ピエゾアシスト」、「Piezo Assist」および「PiezoAssist」は有限会社メカノトランスフォーマの登録商標です。
| 品名 | 先端形状 |
|---|---|
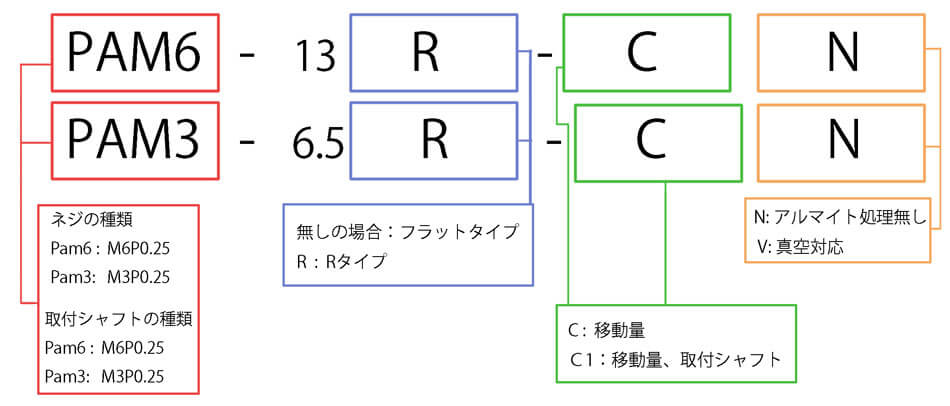
| PAM3-6.5 | フラットタイプ, 3mm, 最小移動量 30nm, 取り付け部 φ6シャンク |
| PAM6-13 | Rタイプ, 6.5mm, 最小移動量 25nm, 取り付け部 φ9.5シャンク |
| PAMC-104 | ピエゾアシストモータコントローラ, 4軸, RS232C通信 |
| PAM-RC100 | ピエゾアシストモータコントローラ(リモコン) |
| PAMC-204 | ピエゾアシストモータコントローラ, 4軸, RS485通信, usb |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | |
|---|---|---|---|---|---|
| PAM6-13 | フラットタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 有り | PAMC-104/ PAMC-204 |
| PAM6-13R | Rタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 有り | PAMC-104/ PAMC-204 |
| PAM6-13R-C | Rタイプ | ±3mm | φ9.5 (M9.5 x 0.5) | 有り | PAMC-104/ PAMC-204 |
| PAM6-13R-C2 | Rタイプ | ±4mm | φ9.5 | 有り | PAMC-104/ PAMC-204 |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | |
|---|---|---|---|---|---|
| PAM6-13N | フラットタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 無し | PAMC-104/ PAMC-204 |
| PAM6-13RN | Rタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 無し | PAMC-104/ PAMC-204 |
| PAM6-13R-CN | Rタイプ | ±3mm | φ9.5 (M9.5 x 0.5) | 無し | PAMC-104/ PAMC-204 |
| PAM6-13R-C2 | Rタイプ | ±4mm | φ9.5 | 無し | PAMC-104/ PAMC-204 |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | |
|---|---|---|---|---|---|
| PAM3-6.5 | フラットタイプ | ±3mm | φ6 | 有り | PAMC-104/ PAMC-204 |
| PAM3-6.5R | Rタイプ | ±3mm | φ6 | 有り | PAMC-104/ PAMC-204 |
| PAM3-6.5R-C1 | Rタイプ | ±(3mm±0.2) | φ5 | 有り | PAMC-104/ PAMC-204 |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | |
|---|---|---|---|---|---|
| PAM3-6.5N | フラットタイプ | ±3mm | φ6 | 無し | PAMC-104/ PAMC-204 |
| PAM3-6.5RN | Rタイプ | ±3mm | φ6 | 無し | PAMC-104/ PAMC-204 |
| PAM3-6.5R-C1N | Rタイプ | ±(3mm±0.2) | φ5 | 無し | PAMC-104/ PAMC-204 |
# PAMの型番決め方
ピエゾアシストモータの動作原理
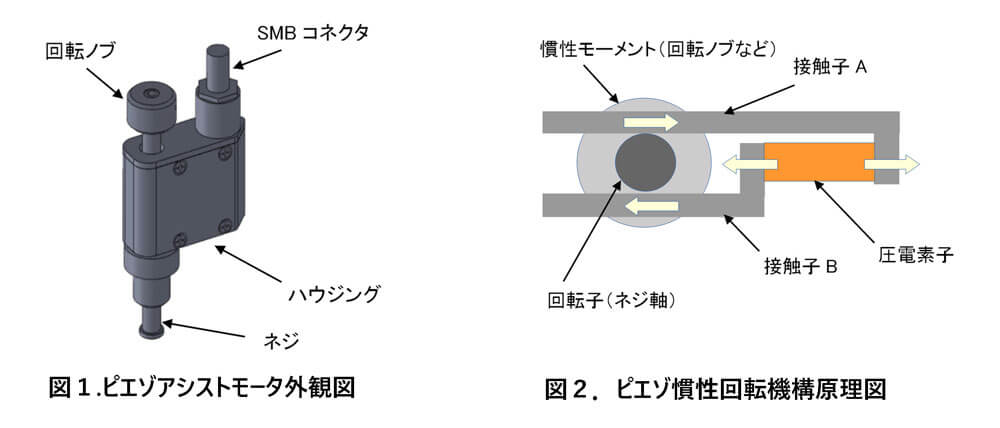
ピエゾアシストモータは、ハウジング内のピエゾ慣性回転機構によりネジ軸を回転し、ネジ軸方向に推力と変位を発生します。
図2のピエゾ慣性回転機構原理図に於いて、回転子はネジ軸と一体で慣性モーメント(回転ノブなど)に接続されており、回転子と 接触子間には所要の静摩擦力を持たせる様に圧力(非表示)が印加されています。図2のように圧電素子が伸びると、接触子A,Bは図2のように相対動作します。この接触子A,Bの相対動作の加速度によって慣性モーメントに生じる回転運動の加速度による発生力が、回転子 と接触子間の静摩擦力以下である場合には、回転子は回転運動を起こし、静摩擦力以上である場合には、回転子と接触子間にはすべりを生じます。
用途
(PAM6-13の応用例)ステージ(40×40□、60×60□)に取り付ける。
- 顕微鏡のスキャニング
- 高速スループット顕微鏡
- 高分解能顕微鏡
- マイクロマニピュレーション
- バイオテクノロジー
- 干渉計形状測定
- マスク/ウエハー位置決め
- 計測技術
- ミラーホルダー角度調整
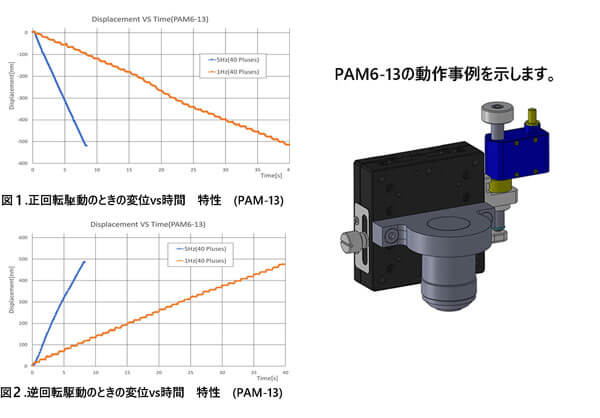
ピエゾアシストモータの動作事例
図1、図2は、この装置を用いて、駆動周波数1Hz及び5Hzで40パルス駆動したときの 変位vs時間特性です。
図1は正回転、図2は逆回転の場合です。
- 1Hzでは、10~16nm/pulseの階段状変位になり、5Hzでは滑らかに変位しています。
- 40パルスに対する変位量は、1Hz 5Hzともに、正回転では 480nm(平均 12nm/pulse、逆回転では 520nm(平均 13nm/pulse)になっています。
ピエゾアシストモータの応用例(ミラーホルダー角度調整)
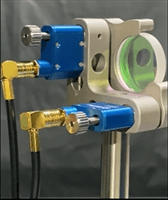
- ナノメートル単位の超精細な分解能
- 電源無供給でも位置を保持
- 可動角度範囲は±3.5°(≒ ± 61mrad)
- 1.6 μrad ずつ超精細に調整可能(7万段階以上)