Visual SLAM とは
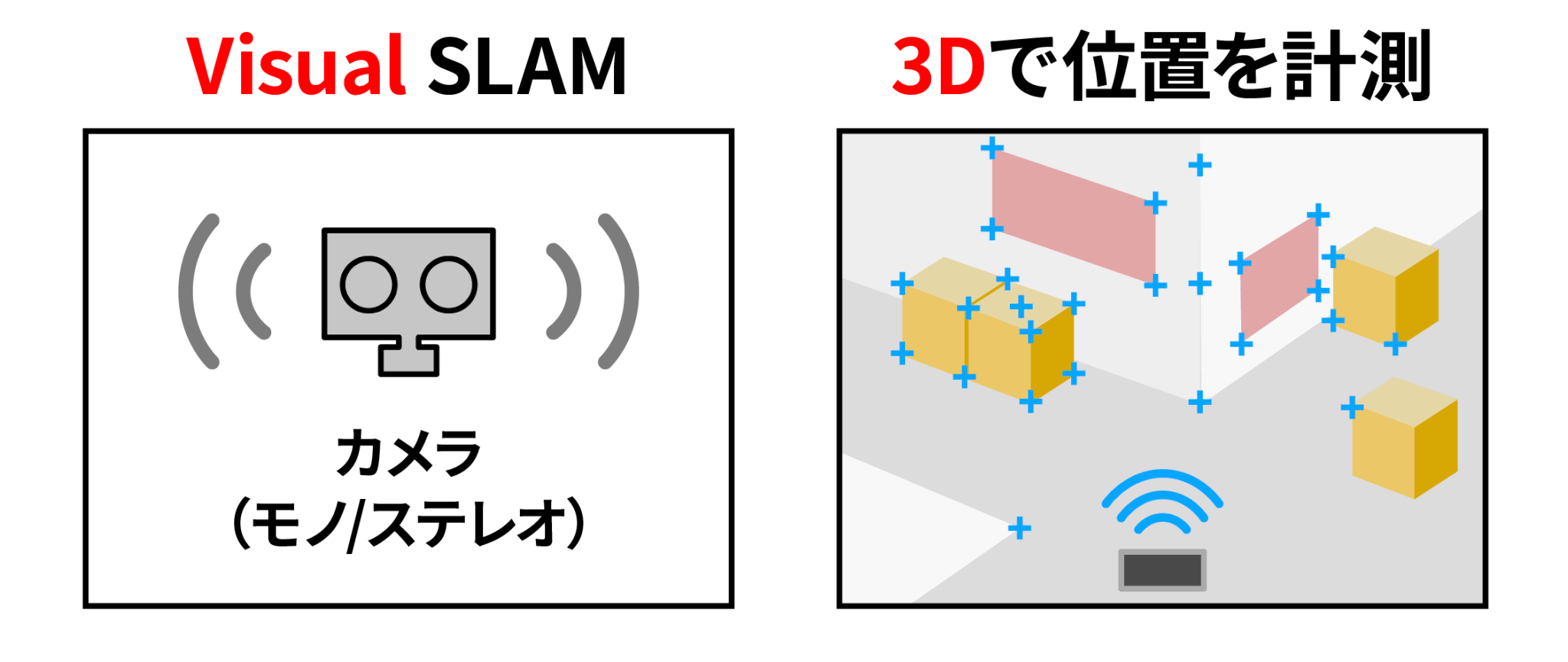
Visual SLAM (ビジュアルスラム)とは、カメラやイメージセンサーを使って、自分自身の現在位置を推定しながら、周囲の環境地図を同時に構築する技術です。SLAMとは「Simultaneous Localization and Mapping(自己位置推定と地図作成の同時実行)」の略称で、もともとはロボット工学の分野で発展してきました。この技術は近年、ドローンへの応用が進んでおり、特にGPSが使えない屋内や橋の下といった環境で大きな力を発揮します。Visual SLAM を活用することで、ドローンは操縦者の手を借りずに、周囲の状況をリアルタイムに把握しながら自律的に飛行することが可能になります。これにより、より複雑な環境でも安定した飛行と高精度な位置制御が実現できます。
特徴と利点
1.低コストで導入可能
- LiDARに比べカメラやイメージセンサーのコストは安価。技術進歩により精度も向上し、急速な普及が進んでいる
2.拡張性が高い
- 映像解析や機械学習と組み合わせることで、位置推定や地図作成の精度がさらに高まり、ドローン以外のロボットや建物内巡回などにも活用が広がっている
動作の仕組み
- ドローンに搭載された複数のカメラやセンサーで周囲の3次元情報を取得。
- IMUセンサー(加速度・角速度)データと統合し、自己位置の推定を行いながら、環境地図を生成しつつ飛行する
センサーの飽和(Saturation)
- 大量の映像処理が必要なため、高度な計算リソースが求められる。
- センサー性能に依存するため、質が低いと位置推定の精度が低下する可能性がある。
活用シーン
- GPS電波が届かない屋内や、構造物の下など、GPSが不安定な環境での飛行に有効。
- 磁気コンパスが影響を受けやすい鉄塔や金属構造物付近でも、環境地図から機体の向きを正確に判断し、安定飛行を実現
- ただし、暗所ではカメラ性能が限界に達し、地図生成が難しくなる点には注意が必要
点群SLAMとVisual SLAM の違いについて
点群SLAM(LiDAR SLAM)とVisual SLAM は、ともに自己位置推定と環境の地図作成を行う技術ですが、それぞれ使用するセンサーや特性に違いがあります。
■ 点群SLAM(LiDARベース)
LiDARを用いることで、高精度な距離計測と三次元形状の取得が可能です。
特に、暗所や視覚情報の少ない環境でも安定して動作できる点が大きな利点です。
一方で、点群データの処理には高い計算リソースが必要となり、動的な対象物や高速移動を伴う環境では精度の維持が難しい傾向があります。
■ Visual SLAM (カメラベース)
Visual SLAM はカメラを利用することで、軽量・低コストかつ多様なデバイスに搭載しやすいという利点があります。
高解像度の映像から環境の特徴を細かく捉え、動的な対象物の追跡にも適しています。
そのため、物体認識や人の動きの追従などに強みがあります。
ただし、明るさや視覚的特徴に大きく依存するため、暗所や色・柄が単調な環境では精度が低下することがあります。
Visual SLAM の必要性
Visual SLAM はカメラから得られるカラー画像やテクスチャ情報を活用できるため、環境の詳細な特徴(例:壁の模様や物体の色)を捉えることができます。
これに対し、点群SLAMはLiDARを使用し、距離データを取得することで精度の高い3Dマッピングを行いますが、色情報が得られません。
まとめ
Visual SLAM は、ドローンの自律飛行を支える重要技術であり、特に屋内やGPSなし環境での利用価値が高いです。
LiDARと比べてコストが低く、機械学習との融合で今後さらに性能が高まることが期待されます。
ただし、リアルタイム処理による高負荷や、暗所での劣化といった課題もあります。
光響取り扱い LiDAR メーカー7社