LiDAR と 自動運転
自動運転
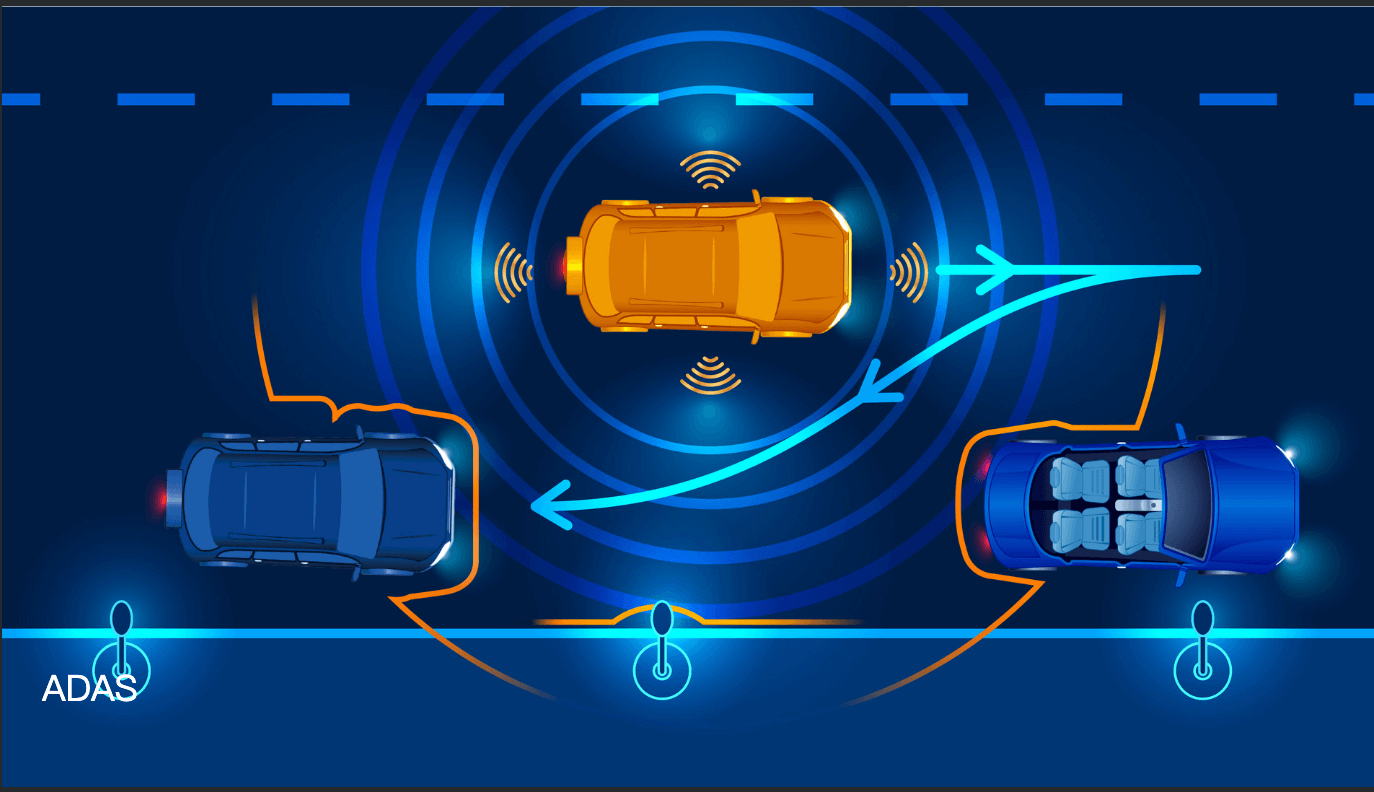
近年活発な自動運転技術の開発ですが、様々な技術的課題があります。この技術的課題の解決にもLiDARは使用されています。
自動運転で使用されている主なセンサー技術
- LiDAR: レーザー光を用いて周囲の環境を3次元で高精度に把握します。障害物の形状や距離を正確に測定し、自動運転の安全性に大きく貢献します。
- カメラ: 可視光を用いて周囲の状況を画像として捉えます。信号、標識、歩行者、車両などを認識し、判断材料として活用されます。
- ミリ波レーダー: 電波を用いて、悪天候下でも周囲の車両や障害物を検出できます。特に、LiDARでは捉えにくい速度情報を得るのに有効です。
- 超音波センサー: 近距離の障害物を検出するために使用されます。駐車支援システムなどでも利用されています。
自動運転レベルの中でも運転支援車となるレベル1〜2ではカメラとミリ波レーダーといったセンサーによるサポートが主でしたが、条件付き自動運転車であるレベル3や、ドライバーによる運転を前提としない自動運転車となるレベル4~5の対応になると、高速道路や一般道路を安全に自律走行する機能が必要となります。そのため、センシングの冗長性を担保する必要があるため、カメラやミリ波レーダーに加えて、LiDARが採用されます。
自動運転の目的・効果
- 交通事故の削減
- 地域公共交通の維持・改善(運行の効率化)
- ドライバー不足への対応
- 国際競争力の強化
- 渋滞の緩和・解消
自動運転の技術的課題
- 信号認識
- 複雑な信号(矢印表示など)
- 複数信号(奥・手前など)の同時認識
- 逆光で見えにくくなる信号
- 悪天候で見えにくくなる信号
- 走行空間
- 降雪により見えなくなる白線
- 路上駐車の認識・判断・回避
- 狭い道路での正確な操舵
- 状況の予測・判断
- 交通量の多い交差点での予測と判断
- 不意の飛び出しへの操舵判断
- 障害物の認識
- 傾斜か障害物かの判断
- 様々なサイズの障害物の認識
参考資料:国土交通省 「自動運転の実現に向けた取り組みについて」
自動運転レベル
国土交通省を含むASV推進検討会※1にて定義・合意された内容です。
| レベル | 自動運転レベルの概要 | 運転操作※2の主体 | 対応する車両の名称 |
|---|---|---|---|
| レベル1 |
アクセル・ブレーキ操作またはハンドル操作のどちらかが、部分的に自動化された状態。 <フットフリー> |
運転者 | 運転支援車 |
| レベル2 |
アクセル・ブレーキ操作およびハンドル操作の両方が、部分的に自動化された状態。 <ハンズフリー> |
運転者 | |
| レベル3 |
特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。ただし、自動運行装置の作動中、自動運行装置が正常に作動しないおそれがある場合においては、運転操作を促す警報が発せられるので、適切に応答しなければならない。 <アイズフリー> |
自動運行装置 (自動運行装置の作動が困難な場合は運転者) |
条件付自動運転車 (限定領域) |
レベル4 |
特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。 <ドライバーフリー> |
自動運行装置 | 自動運転車 (限定領域) |
レベル5 |
自動運行装置が運転操作の全部を代替する状態。 |
自動運行装置 | 完全自動運転車 |
※1自動運転の実現に必要なASV(先進安全自動車)技術について、開発・実用化の指針を定めることを念頭に具体的な技術の要件等について検討する産学官の有識者・関係者で構成される検討会
※2車両の操縦のために必要な、認知、予測、判断及び操作の行為を行うこと
LiDAR と ミリ波レーダー
前述の通り自動運転には様々な技術が使われておりセンサー技術としてLiDARも使用されています。ここでは同じく自動運転技術として使われているミリ波レーダーとの違いを解説します。
| 特徴 | LiDAR | ミリ波レーダー |
|---|---|---|
| 原理 | レーザー光 | ミリ波 |
| 強み | 高精度な3Dデータ、長距離測定 | 天候に強い、低コスト、速度測定 |
| 弱み | 天候の影響を受けやすい、高コスト | 解像度が低い |
| 主な用途 | 自動運転車の周囲環境認識、3Dマッピング | 自動運転車の衝突回避、車間距離制御 |
ミリ波レーダー
原理
電磁波の一種であるミリ波を照射し、反射波の位相差から距離を測定します。
特徴
- 天候に強い: 雨や霧などの悪天候下でも安定して動作します。
- 低コスト: LiDARに比べて安価な実装が可能です。
- 解像度が低い: LiDARに比べて得られる情報は少なく、物体の形状を詳細に把握することは困難です。
- 速度測定: ドップラー効果を利用して、物体の速度を測定できます。
用途
- 自動運転車の衝突回避
- 車間距離制御
光響取り扱い LiDAR メーカー7社